Fırçasız Motorlar Nasıl Çalışır ve Nasıl Test Edilir?
Giriş:
Fırçasız Motorlar ile Bir drone inşa ederken ilk adımlardan biri doğru motoru seçmektir. En iyi performansı elde etmek için birden fazla motoru test etmeniz ve tasarımınız için en verimli olanı seçmeniz önemlidir. Drone tasarımında kullanılmak üzere özel olarak üretilmiş birçok elektrik motoru çeşidi de dahil olmak üzere piyasada çok sayıda motor bulunmaktadır. Bu yazımızda sadece elektrik motorları üzerinde duracağız ve aşağıdaki konulara değineceğiz:
- Fırçasız motorlar nasıl çalışır?
- Giriş ve çıkış motorları
- Verimlilik ve performans
- Motor seçimi
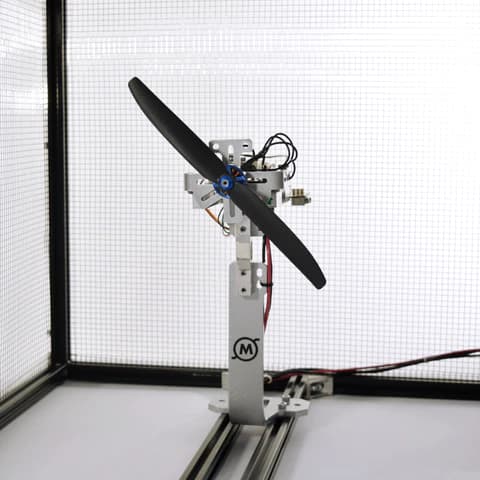
Not: Bu makale için motor ve pervane verilerini toplamak amacıyla 1585 Serisi itme standını kullanacağız.
Fırçasız Motor Nasıl Çalışır?
Fırçasız mekanizmanın çalışma prensibine geçmeden önce bileşenlerine bir göz atalım.
Fırçasız Motorun Bileşenleri:
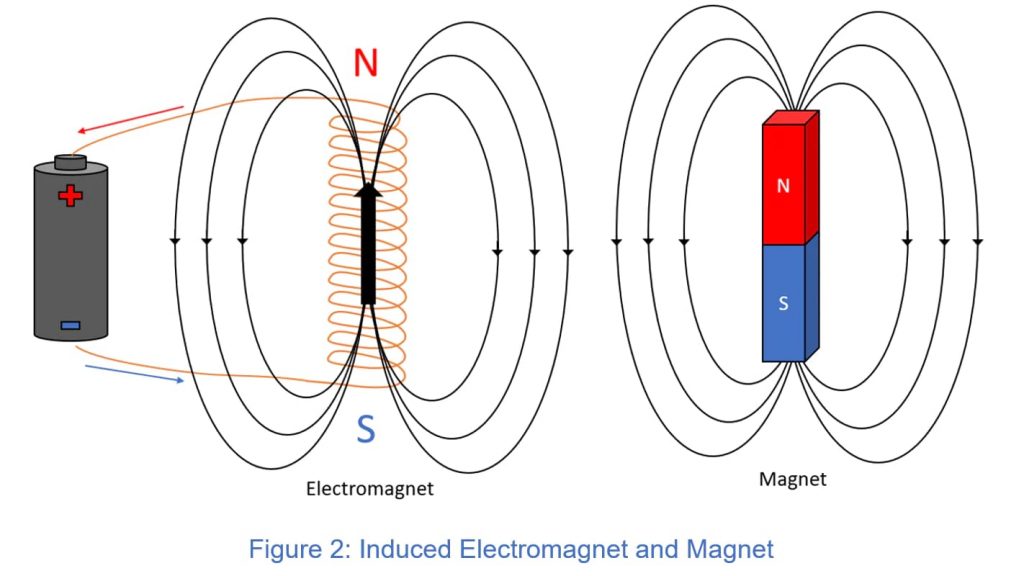
Elektromıknatıslar ve Kalıcı Mıknatıslar:
Metalik bir tabanın etrafına sarılmış iletken bir tel, mıknatıs gibi davranmaz, ancak telden bir akım geçtiğinde, telin mıknatıs gibi davranmasına neden olur. Buna genellikle elektromıknatıs denir. Aynı telden negatif bir akım akarsa, mıknatıs artık ters etkiye sahip olur; başka bir mıknatısı itmek yerine çeker.
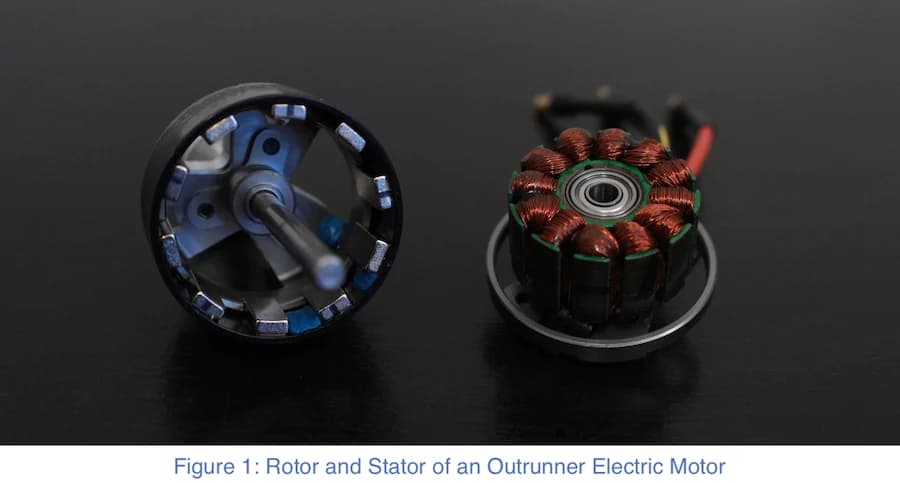
Rotor ve Stator:
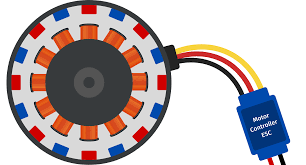
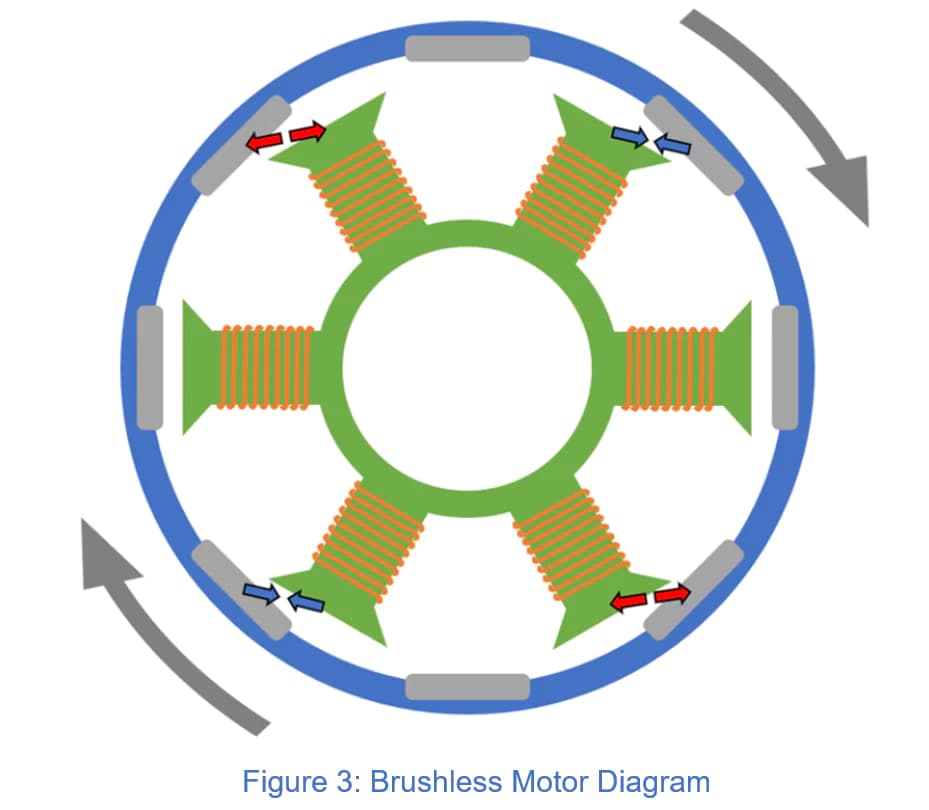
Şekil 3’ün iç çemberinde görülen kısımlar elektromıknatıslardır, dış çemberde ise kalıcı mıknatıslar bulunmaktadır. Motoru çalıştırmak için, bobinlerine elektrik akımı vererek elektromıknatıslardan birini etkinleştirirsiniz. Bu, kalıcı mıknatıs benzer elektromıknatıs tarafından itilmeye maruz kaldığında ve stator üzerindeki karşıt bir kalıcı mıknatısla hizalanmaya çalıştığında rotorun dönmeye başlamasını sağlayacaktır.
Bu, elektromıknatıs ve karşıt kalıcı mıknatıs hizalandığından yalnızca kısa bir süre dönmesine neden olacaktır. Bir sonraki adım, dönüşün durmasını önlemek için başka bir elektromıknatısa güç vermek, ardından bir sonraki elektromıknatıs ve bir sonraki adım, vb.
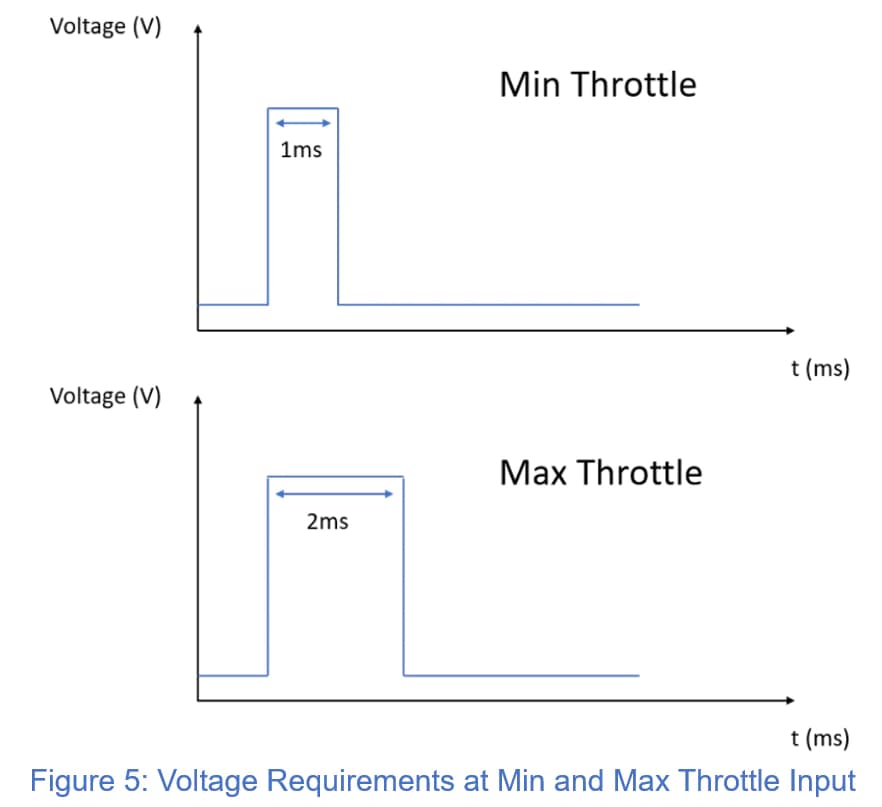
Belirli bir frekansta üç fazlı bir akım iletildiğinde motor, o sinyalin frekansına eşit bir hızda dönecektir. Drone’un kontrol ünitesindeki gaz kelebeği, motorun hızını değiştirmek için kullanılır; daha yüksek bir gaz kelebeği girişi, drone’a daha yüksek frekanslı bir sinyal gönderir. Elektronik Hız Kontrol Cihazı (ESC), gaz kelebeği girişine göre motorun hızını ayarlamak için sinyal dağıtımını kontrol eder.
ESC’nin Rolü Nedir?
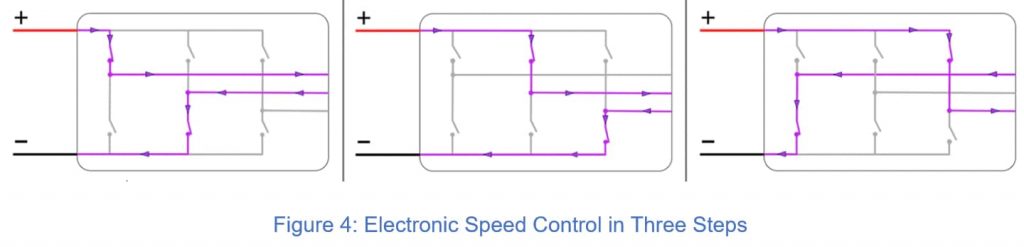
Bir ESC veya Elektronik Hız Kontrol Cihazı, hızdaki değişikliklere ve hatta dönüşün tersine çevrilmesine dönüşen elektrik sinyallerini ileterek elektrik motorunu kontrol eder. Alternatif bir üç fazlı akım elde etmek için bir anahtar sistemi ile birleştirilmiş doğru akımı kullanır. Bu çıkış akımı daha sonra devredeki anahtarların açılma ve kapanma hızı değiştirilerek değiştirilebilir.
Fırçasız ESC’ler, motoru çalıştırabilmek ve dönüş yönünü seçebilmek için rotorun mevcut konumu hakkında bilgiye ihtiyaç duyar. Konumunu belirlemek için ESC, endüksiyonunu ölçmek için güç verilmeyen son elektromıknatıstan gelen bilgiyi kullanır. Bu indüksiyon, en yakın kalıcı mıknatısın nerede olduğuna bağlı olarak değişir ve elektromıknatısa ne kadar yakınsa indüklenen manyetik alan o kadar güçlü olur.
Gaz kelebeği motorun hızını değiştirmek için kullanılır. Bunu yapmak için ESC’nin gaz kelebeği sinyaline göre anahtarlama frekansını ayarlaması gerekir. Farklı performanslara sahip çeşitli sinyal dağıtım protokolleri vardır; en yaygın olanları Oneshot, Multishot ve Dshot’tır.
Aralarındaki fark, iletilen sinyallerin frekansıdır. Daha kısa frekanslar daha hızlı reaksiyon süresine izin verir. Ayrıca Dshot protokolü analog sinyal yerine dijital sinyal göndermesi nedeniyle diğer iki protokolden farklıdır. Bu, elektriksel gürültüye karşı daha az duyarlı olduğundan ve daha yüksek çözünürlüğüyle daha hassas olduğundan sinyali daha güvenilir hale getirir.
Inrunner veya Outrunner
Prensip:
Her fırçasız motor, stator ve rotor olmak üzere iki ana parçadan oluşur. Stator statiktir, hareket etmez ve elektromıknatısları tutar. Rotor, kalıcı mıknatısları tutan dönen bileşendir. İki tip Fırçasız DC motor vardır: Inrunner ve outrunner modelleri.
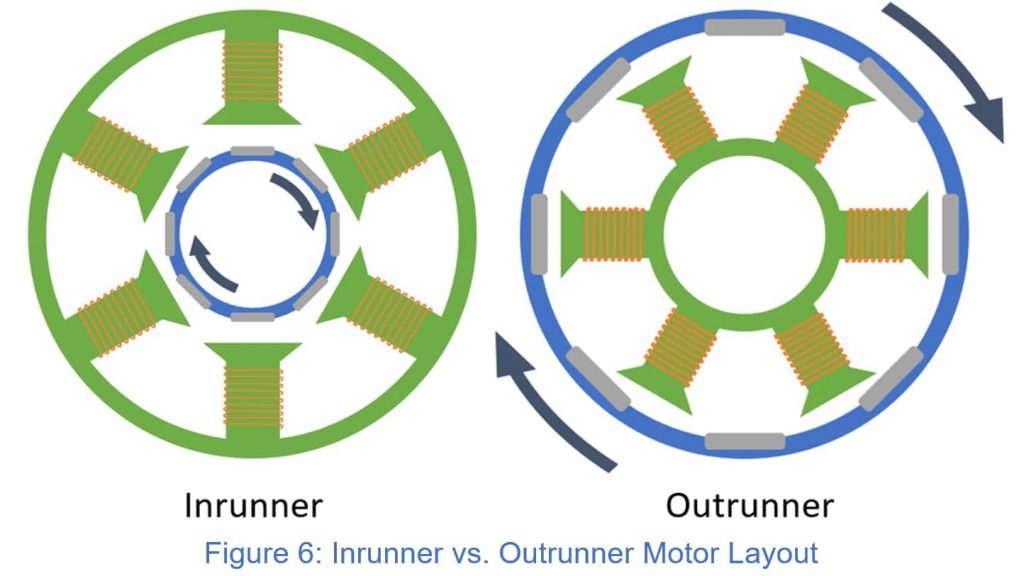
Çalıştırıcı motorlar için rotor, statorun ‘içinde’ veya motor muhafazasına göre daha içeriye doğru döner. Rotor statorun ‘dışarısında’ veya daha da dışarıya doğru döndüğünden, dıştan koşucu motorlar tam tersi bir düzene sahiptir, bkz. şekil 6. Her iki modelin de artıları ve eksileri vardır.
Aynı boyuttaki bir iç koşucu ve bir dış koşucu karşılaştırıldığında, kuvvetlerin uygulandığı çapın farklı olduğunu görmek kolaydır. Bunun nedeni, elektromıknatısların, kalıcı mıknatısları taşıyan rotordan çok daha fazla yer kaplamasıdır. Elektromıknatıslar içeride bulunuyorsa çap, dışarıya yerleştirildiklerine göre daha büyüktür (şekil 6).
Boyutun yanı sıra motor performansına ilişkin sonuçların da dikkate alınması önemlidir. Daha büyük çap daha fazla tork anlamına gelir çünkü kuvvet dönüş merkezinden daha uzağa uygulanır; daha küçük çap ise yüksek devir/dakika için daha iyi olur. Bu nedenle, koşucular yüksek hızda en iyi şekilde çalışır ancak daha az tork üretirken, outrunner’lar daha büyük pervanelerle en iyi şekilde çalışır çünkü daha fazla tork üretebilirler ancak daha yavaş hızda dönerler.
Drone Sektöründe Fırçasız Motorlar:
Yukarıda açıklanan nedenlerden dolayı eVTOL’ler, yüksek torkları nedeniyle sıklıkla dikey itme için dış koşucular kullanır. Koşucular daha çok kanallı fan jetleri veya sabit kanatlı uçaklar için ve yüksek RPM gerektiren yatay hareketler için kullanılır. Bunu, bir motorun RPM/Volt değeri olarak da bilinen Kv değeri aracılığıyla anlamak kolaydır.
Bu değer, üzerinden 1 V gönderildiğinde motorun hangi hızda döneceğini belirler. Bu nedenle, bir giriş koşucusu tipik olarak aynı boyuttaki bir çıkış koşucusundan daha yüksek bir Kv değerine sahiptir çünkü yukarıda belirtildiği gibi giriş koşucu aynı voltaj için daha hızlı dönen daha küçük bir rotora sahiptir. Fırçasız motorlara göz atarken sıklıkla ilk olarak Kv değerinin görüntülendiğini göreceksiniz.
Verimlilik ve Performans
Bir drone’un performansından bahsederken çoğu zaman uçuş süresini düşünürüz. Ne yazık ki en gelişmiş akü teknolojileri ağırlık/enerji oranı açısından gaz motorlarıyla rekabet edemiyor. Tek çözüm, akü şarjını en verimli şekilde kullanacak elektrik bileşenlerini dikkatli seçmektir.
Bir pilin enerji tüketimini birçok faktör optimize edebilir. Bu faktörlerden biri motorun verimliliğidir. Daha yüksek verimlilik, ağırlık/enerji oranının artmasına yardımcı olur, böylece motordan ve drone’dan daha yüksek performans elde edilir. Bir motorun test edilmesi, üreticinin spesifikasyonları ile motorun kalitesi arasındaki farkların farkında olmak açısından çok önemlidir. Bu fikri göstermek için, farklı fiyat aralıklarına sahip iki benzer BLDC motorun karşılaştırmasını sunuyoruz.
Motorların performansını karşılaştırmak için RCbenchmark Series 1580 itme standını kullandık. İtki, tork, voltaj, akım, RPM ve verimliliği ölçebilir. Veri toplama RCbenchmark yazılımı kullanılarak yapılır. Test edilen iki motor sırasıyla 1500 Kv ve 2300 Kv T2407’lerdir. Her iki motor da aynı 7 inçlik pervaneyi 4 adımla döndürüyor.
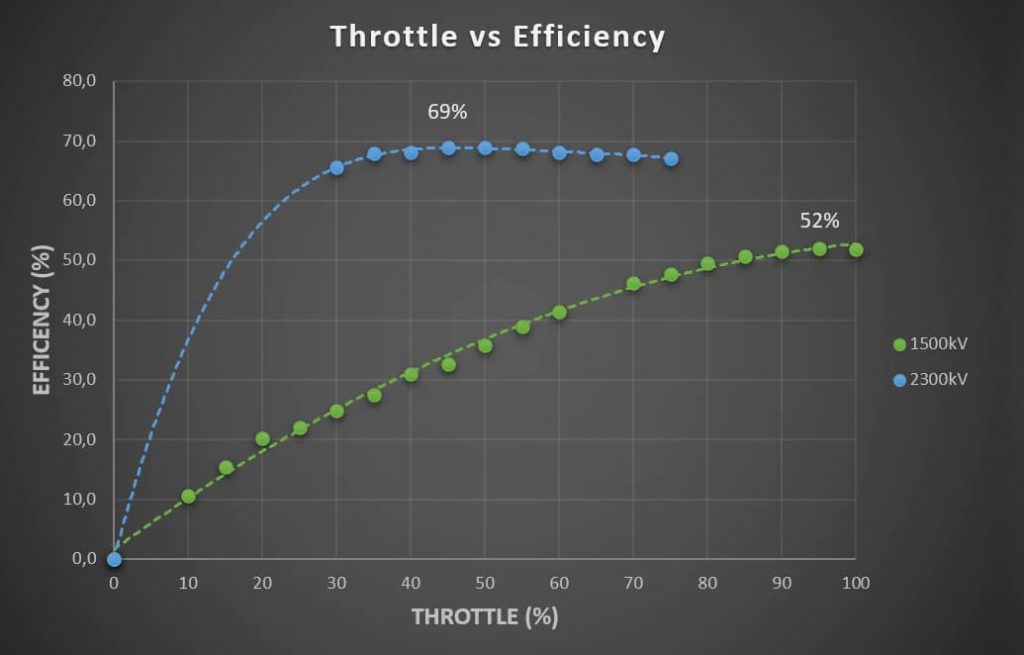
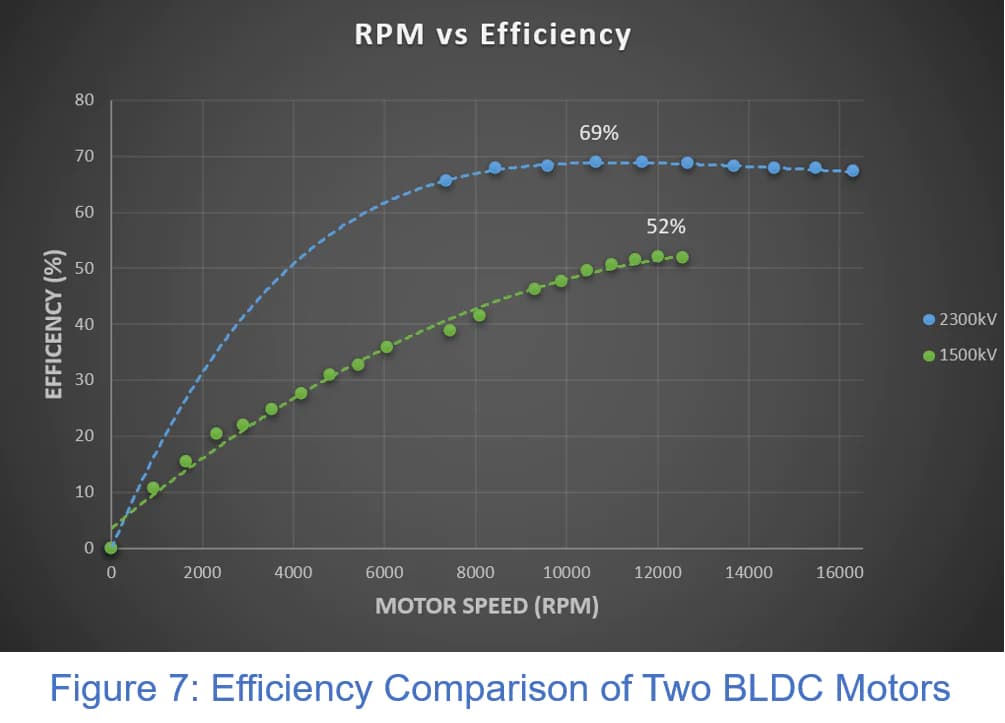
Şekil 7’deki ilk grafik, gaz kelebeğine kıyasla her iki motorun verimliliğini göstermektedir. İkinci grafik belirli hızlardaki verimliliği göstermektedir. Açıkçası, daha küçük 1500 Kv motorun verimli çalışması için daha fazla gaza ihtiyacı vardır. Aynı pervane ile bu kurulumda 2300 Kv motorla aynı verimi elde edemeyecektir. Verimlilik aralığı da 2300 Kv motorda daha iyidir, bu da motorun hem düşük hem de maksimum hızda yüksek verimliliği koruduğu anlamına gelir.
Öte yandan, daha küçük Fırçasız Motorlar daha yüksek hızda çalışabilir ve daha küçük bir pervaneyle muhtemelen daha verimli olabilir. Taşıma için kullanılan bir drone, düşük hızda boşta ve sabit kalabilmek için daha küçük bir motor kullanacaktır.
Tam bir karşılaştırma yapabilmek için drone’un amacını ve çalışacağı RPM’yi bilmemiz gerekir. 1500 Kv motorun farklı bir fonksiyona uygun farklı bir pervane ile daha verimli olması mümkündür. Bunu ancak test yaparak öğrenebiliriz.
Motor Seçimi
Son olarak motor seçerken nelere dikkat edilmesi gerektiğinden bahsedelim. En önemli karakteristik, motora güç girişi için elde ettiğiniz dönüş hızını tanımlayan motor Kv’dir. 2000 Kv’lik bir motor, motora gönderilen her volt için dakikada 2000 devirle dönecektir.
Boyut Kv ile yakından ilişkilidir. Geniş ve büyük bir motor genellikle daha yüksek torka sahip olur ancak daha düşük Kv’ye sahip olur ve daha büyük bir pervane kullanır; ince ancak daha uzun bir motor ise yüksek Kv’ye, düşük torka sahip olur ve küçük bir pervane için en uygunudur. Daha büyük bir motorun daha düşük RPM’de çalıştığını, küçük bir motorun ise nispeten yüksek RPM’de çalıştığını düşündüğünüzde bu mantıklıdır.

Bir motorun maksimum gücü de dikkate alınması gereken bir şeydir. Motorun güç sınırlamasının aşılması, motorun ısınmasına ve dolayısıyla verimliliğinin önemli ölçüde azalmasına ve hatta hasar görmesine neden olabilir. Marka aynı zamanda bir motorun performansını da değiştirebilir. Aynı Kv değeri için bir markanın motoru diğerlerinden daha iyi performans gösterebilir. Bu yüzden etrafına bir drone kurmadan önce motorunuzu test etmelisiniz.
Genel bir kural olarak, Fırçasız Motorlar aşırı güçlenme ve aşırı ısınma tehlikesi olmadan mümkün olan en küçük (en hafif) motoru kullanmak akıllıca olacaktır. Bunun nedeni ise ihtiyaç duyulandan büyük olan bir motorun fazla ağırlığını azaltmaktır.
Sonsöz
Fırçasız DC motor, elektrikli tahrik dünyasında oyunun kurallarını değiştiren dahiyane bir buluştur. Basit ve akıcı tasarımları sayesinde RC arabaları ve drone’lar gibi araçların maksimum kontrolle yüksek verimlilikle çalışmasına olanak tanır.





{kind=link}