Cube Modülüne Genel Bakış
The Cube Fixed Board
- Siyah, Yeşil, Mavi F4, Mor F4 STM32F427; flaş 2MB, RAM 256KB.
- Sarı STM32F777; flash 2MB, Ram 512KB.
- Turuncu, Mavi H7, Mor H7 STM32H753; flaş 2MB, RAM 1MB.
- Yerleşik 16KB SPI FRAM
- Siyah, Yeşil, Mavi F4, Mor MPU9250 16G entegre ivmeölçer / jiroskop.
- Turuncu, Mavi H7, ICM 20649 30G entegre ivmeölçer / jiroskop.
- MS5611 Barometre
- Tüm sensörler SPI aracılığıyla bağlı .
- SDIO aracılığıyla Micro SD arayüzleri.
*CubeBlue US ve müttefik bileşenlerle ABD’de üretilmiştir
EOL ve Değiştirme
MPU9250, LSM303D, L3GD20’nin tümü EOL’dir, Bu nedenle, tüm yeni tasarımlar H7 tabanlı CubeBlueH7, CubeOrange ve CubePurpleH7 kartlarını kullanmalıdır, 2014 yılına kadar uzanan referans tasarımımızla uyumlu tüm taşıyıcı kartlarla %100 tak ve çalıştır özelliklidir.
Buradaki en son düzenleme zamanında küp PurpleF4 hala stoktaydı ama stoklar bittiğinde yerini CubePurpleH7 alacak.
Titreşim Sönümlü IMU kartı sürüm 1 (Cube Black, Cube BlueF4, Cube Green’e Takılmıştır)
LSM303D entegre ivmeölçer / manyetometre.
L3GD20 jiroskop.
MPU9250 Gyro / Hızlanma
MS5611 Barometre
SPI aracılığıyla bağlı tüm sensörler.
Titreşim Sönümlü IMU kartı sürüm 2 (Cube Orange, Cube BlueH7 ve Cube Yellow’a takılır)
ICM20602
ICM 20948
MS5611 Barometre
SPI aracılığıyla bağlı tüm sensörler.
G/Ç bağlantı noktaları
14 PWM servo çıkışı (8 IO’dan, 6 FMU’dan).
CPPM, Spektrum / DSM ve S.Bus için R/C girişleri.
Analog / PWM RSSI girişi.
S.Bus servo çıkışı.
5 genel amaçlı seri port, 2’si tam akış kontrollü
İki I2C bağlantı noktası
Bir SPI bağlantı noktası (arabelleğe alınmamış, yalnızca kısa kablolar için kullanılması önerilmez).
İki CAN Bus arayüzü. (CubePilot Logolu BlueH7 ve Orange için CAN FD)
3 Analog giriş
Yüksek güçlü piezo buzzer sürücüsü. (Genişleme kartında)
Yüksek güçlü RGB LED. (I2C sürücüsü uyumlu Yalnızca harici olarak bağlanır)
Emniyet anahtarı / LED.
SİSTEM MİMARİSİ
Küp, iki fonksiyonel bloğu tek bir fiziksel modülde birleştiren önceki nesilden FMU + IO mimarisi ile devam ediyor.
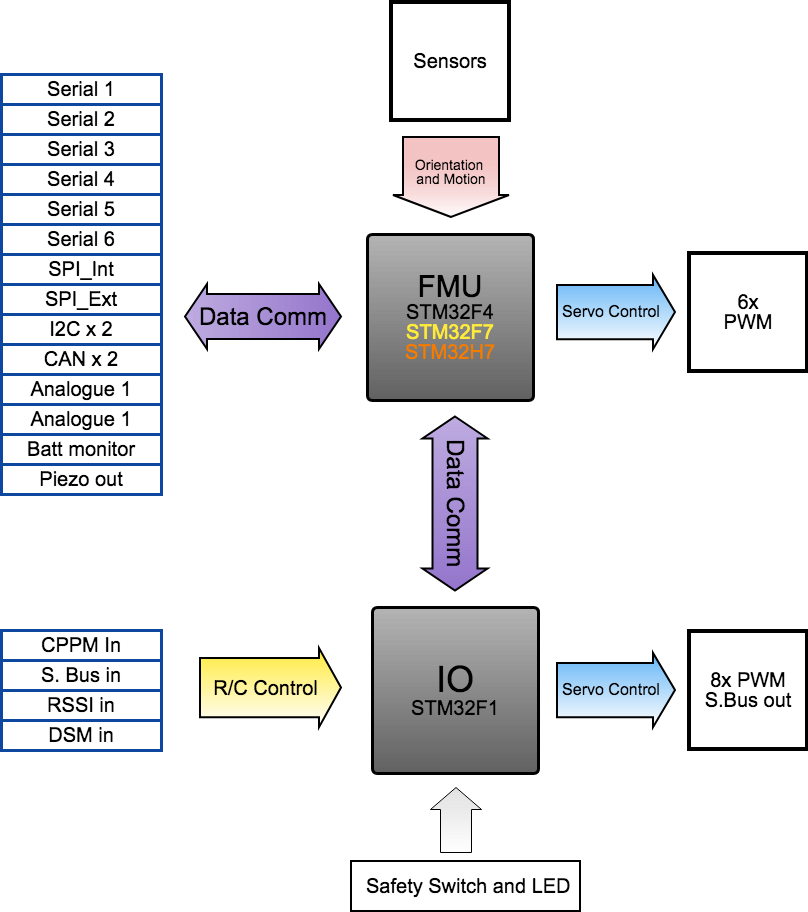
PWM Çıkışları
Cube, IO’ya bağlı sekiz PWM çıkışına sahiptir ve FMU etkin olmasa bile (arıza güvenli / manuel mod) R/C girişi ve yerleşik karıştırma yoluyla doğrudan IO tarafından kontrol edilebilir. Bu çıkışlarda birden fazla güncelleme hızı üç grupta desteklenebilir; dörtlü bir grup ve ikişerli iki grup. 400Hz’e kadar PWM sinyal hızları desteklenebilir. Bu 8 PWM’ler YALNIZCA çıkışlıdır ve her biri 50mA’ya kadar sürme yeteneğine sahiptir, ancak 8 için yalnızca toplam 100mA’dır.
Altı PWM çıkışı FMU’ya bağlanır ve azaltılmış güncelleme gecikmesi sunar. Bu çıkışlar, arıza emniyetli koşullarda IO tarafından kontrol edilemez. Bu çıkışlarda iki grupta birden fazla güncelleme hızı desteklenebilir; dört kişilik bir grup ve iki kişilik bir grup.
400Hz’e kadar PWM sinyal hızları desteklenebilir.
Tüm PWM çıkışları EDS korumalıdır ve servoların yanlışlıkla yanlış bağlanmasına zarar vermeden hayatta kalacak şekilde tasarlanmıştır. Servo sürücüler, 2m 26AWG servo kablo üzerinden 50pF servo giriş yükü sürmek üzere belirlenmiştir.
G/Ç PWM çıkışları, ayrı GPIO’lar olarak da yapılandırılabilir. Bunların yüksek güçlü çıkışlar olmadığını unutmayın – PWM sürücüleri, röleleri veya LED’leri değil, yalnızca servoları ve benzer mantık girişlerini sürmek için tasarlanmıştır.
Çevresel Bağlantı Noktaları
Tüm çevre birimleri tek bir 80 pinli konektör aracılığıyla bağlanır ve çevre birimleri her uygulama için özelleştirilebilen bir temel kart aracılığıyla bağlanır
Base Board
İlk ana kart, çevresel bağlantı noktalarının her biri için ayrı konektörlere sahiptir (birkaç istisna dışında.
Beş seri bağlantı noktası sağlanır. Seri 1 ve 2, tam akış kontrolüne sahiptir. Seri 3, GPS bağlantı noktası olarak önerilir ve güvenlik düğmesi ve (muhtemelen güvenlik led’i) ile pusula ve RGB LED için I2C’ye sahiptir. Seri 4 ayrıca I2C’ye sahiptir, ancak ikinci veri yolunda, böylece aynı anda iki pusula modülünün bağlanmasına izin verir. Seri 5, panonun altında bir başlık olarak mevcuttur. Seri bağlantı noktaları 3.3V CMOS mantık seviyesi, 5V toleranslı, arabelleğe alınmış ve ESD korumalıdır.
SPI bağlantı noktası arabelleğe alınmaz; sadece kısa kablolarla kullanılmalıdır. Sinyaller 3.3V CMOS mantık seviyesindedir, ancak 5V toleranslıdır. SPI, yalnızca bir CS ve INT pini ile birlikte ilk ana karttaki noktaları test etmek için kullanılabilir.
Analog 1-3, 12V’a kadar olan girişlere karşı korumalıdır, ancak 0-3.3V girişler için ölçeklendirilmiştir. RSSI girişi, PWM veya analog RSSI’yi destekler. Bu giriş, S.Bus çıkışıyla bir pini paylaşır – aynı anda yalnızca biri bağlanabilir.
CPPM, S.Bus ve DSM/Spektrum girişi önceki sürümlerden farklı değildir.
CAN bağlantı noktaları standart CAN-Bus’tur; veri yolunun bir ucu için sonlandırma, gemide sabitlenmiştir. Sürücüler FMU’dadır
Piezo portu, 5 – 300nF aralığındaki çoğu piezo elemanını 35V’a kadar çalıştıracaktır. tahrik edilen piezo elemanının hassasiyeti ile sınırlanan ulaşılabilir ses basıncı seviyesi ile son derece yüksek olması amaçlanmıştır.
I2C doğrudan tahriklidir, arabelleğe alınmaz ve FMU’da 3.3v’a kadar çekilir
Seri 5, daha yeni taşıyıcı kartlarda bulunan yerleşik ADSB-IN alıcısı için kullanılır
Sensörler
The Cube’daki tüm uçuş sensörleri SPI aracılığıyla bağlanır.
| Cube TİPİ | Yaşam | IMU1 | IMU2 | IMU3 | Baro1 | Baro2 |
| CubeBlack CubeBlueF4 CubeGreen | EOL | MPU9250 | LSM303D L3GD20 | MPU9250 | MS5611 | MS5611 |
| CubeBlack+ | EOL | MPU9250 | ICM20602 | ICM20948 | MS5611 | MS5611 |
| CubePurpleF4 | EOL | MPU9250 | n/a | n/a | MS5611 | n/a |
| CubePurpleH7 | Aktif | ICM20649 | n/a | n/a | MS5611 | n/a |
| CubeOrange CubeYellow CubeBlueH7 | Aktif | ICM20649 | ICM20602 | ICM20948 | MS5611 | MS5611 |
IMU1, İzole edilmemiş
IMU2 & 3, Yalıtılmış
Tüm sensörlerden gelen veriye hazır sinyaller, İzole IMU’dan YÖNLENDİRİLMEMİŞTİR
Güç Mimarisi
Cube, güç yönetimini FMU’dan kaldırır, Servo rayı artık FMU için birincil yedek güç kaynağı değildir ve IO’yu son şans arıza güvenliği için orada bırakır.
3.3v kaynağı
FMU ve sensörler için dijital ve analog güç alanlarını ayırın.
FMU güç kaynağı arızası durumunda IO için yedek güç.
Güç yönetimi modülü (FMU’dan ayrı)
Cube güç mimarisinin temel özellikleri:
- Uçuş kontrolörü ve çevre birimleri için tek, bağımsız 5V besleme.
- Akım ve voltaj algılama dahil 2 güç tuğlası veya uyumlu alternatif ile entegrasyon.
- Düşük güç tüketimi ve ısı dağılımı.
- Çevresel cihazlar için güç dağıtımı ve izleme.
- Yaygın kablolama hatalarına karşı koruma; düşük/aşırı voltaj koruması, aşırı akım koruması, termal koruma.
- Kararma direnci ve algılama.
FMU ve IO Güç Kaynakları
Hem FMU hem de IO 3.3V’ta çalışır ve her birinin kendi özel çift kanallı regülatörü vardır. The Cube’da (önceden Pixhawk olarak biliniyordu) olduğu gibi, her regülatör, regülatörün dahili güç açma ve bırakma sıralamasına bağlı bir açılış sıfırlama çıkışına sahiptir.
Güç kaynakları
Cube’a güç, USB aracılığıyla, elektrikli tuğla bağlantı noktası veya ikinci tuğla bağlantı noktası aracılığıyla sağlanabilir. Her güç kaynağı, ters kutuplu bağlantılara ve diğer kaynaklardan gelen geri beslemeye karşı korunur.
Cube F4 serisi FMU + IO güç bütçesi, tüm LED’ler ve Piezo buzzer dahil olmak üzere 450mA’dır. Çevresel güç toplam 2.5A ile sınırlıdır. Cube F7 ve H7 serisi FMU + IO güç bütçesi, tüm LED’ler ve Piezo buzzer dahil 550mA’dır. Çevresel güç toplam 2.5A ile sınırlıdır.
Güç bütçesindeki artış, turuncu küp üzerindeki iyileştirilmiş ısıtıcıdan kaynaklanmaktadır.
Nuttx koduyla UÇUŞTA USB TAVSİYE EDİLMEMEKTEDİR
Power Brick Port
Brick bağlantı noktası, Cube için tercih edilen güç kaynağıdır ve eğer varsa, Brick gücü her zaman öncelikli seçilecektir.
Servo Gücü
Cube, bazı kısıtlamalarla hem standart (5V) hem de yüksek voltajlı (10V’a kadar) servo gücünü destekler.
IO, servo konektörden 10V’a kadar gücü kabul edecektir. Bu, ana güç kaynağının kaybolması veya kesilmesi durumunda her durumda IO’nun servo gücüne yük devretmesine izin verir.
FMU ve çevre birimleri, servo konektöründen gelen gücü kabul ETMEYECEKTİR.
Yardımcı Güç
Cube, bir yedek güç bağlantı noktası sunar; bu, birincil güç girişi ile aynı şekilde kurulur.
5.7V üzerindeki giriş voltajlarında güç kilitlenir.
Brick veya başka bir güç kaynağının gerekli akımı sağlayabilmesi koşuluyla, Cube ve çevre birimleri, Aux gücüyle çalışırken toplam 2,75A’ya kadar çekebilir.
Güç asla The Cube tarafından servolara sağlanmaz.
Servo rayı
G/Ç yongası, servo raydan 10.5v’a kadar güç alır; bu, diğer iki ana güç kaynağının arızalanması gibi talihsiz bir durumda manuel moda dönmek için kullanılır. Bu, yalnızca düzlem için kullanışlıdır ve yalnızca G/Ç yongası doğru şekilde eşlenmişse yararlıdır.
USB Gücü
USB’den gelen güç, yazılım güncelleme, test ve geliştirme amaçları için desteklenir. USB gücü, test amacıyla çevresel bağlantı noktalarına sağlanır, ancak ana bilgisayar USB bağlantı noktasının aşırı yüklenmesini önlemek için toplam akım tüketimi, çevre birimleri dahil olmak üzere tipik olarak 500mA ile sınırlandırılmalıdır.
Çoklu Güç Kaynakları
Birden fazla güç kaynağı bağlandığında, geçerli bir giriş voltajına sahip en yüksek öncelikli kaynaktan güç çekilecektir.
Çoğu durumda, FMU’ya güç tuğlası veya tuğla bağlantı noktası veya yardımcı güç rayı aracılığıyla uyumlu bir harici regülatör aracılığıyla güç verilmelidir.
Masaüstü test senaryolarında, USB’den güç almak, BEC veya benzeri bir servo güç kaynağına olan ihtiyacı ortadan kaldırır (yine de servoların kendileri hala harici güce ihtiyaç duyacaktır).
Özet
Listelenen bileşenlerin her biri için, cihaza her bir girişten güç sağlanabileceği giriş voltajı aralıkları gösterilir.
| Brick port | Aux port | USB port | Servo rail | |
| FMU | 4 – 5.7V | 4 – 5.7V | 4 – 5.7V | NIL |
| IO | 4 – 5.7V | 4 – 5.7V | 4 – 5.7V | 4 – 10.5V |
| Çevre birimleri | 4 – 5.7 2.5A max | 4 – 5.7 2.5A max | 4 – 5.7 2.5A max | NIL |
Cube, çevre birimleri için güç yönlendirme, aşırı/düşük voltaj algılama ve koruma, filtreleme, anahtarlama, akım sınırlama ve geçici bastırma sağlar. Çevre birimlerine giden güç çıkışları, ESD ve EMI filtreleme özelliğine sahiptir ve güç kaynağı koruma şeması, çevre birimlerine 5,5V’den fazla sunulmamasını sağlar. Mevcut besleme voltajı 2,7V’nin altına düştüğünde veya yaklaşık 5,7V’nin üzerine çıktığında çevre birimlerinden güç bağlantısı kesilir.
Çevresel güç iki gruba ayrılır:
Seri 1 (TELEM 1), düşük bir güce güç sağlamak için tasarlanmış özel bir 1.5A akım sınırına sahiptir. Bu çıkış ayrı olarak EMI filtrelidir ve doğrudan USB / Brick girişlerinden çeker. Bu bağlantı noktasındaki maksimum güç tüketimi 1,5A’yı geçmemelidir, hiçbir koşulda telemetrinizi bu bağlantı noktasından asla çalıştırmayın.
Diğer tüm çevre birimleri, 1A akım sınırını ve tek bir güç anahtarını paylaşır. Bu bağlantı noktasındaki maksimum güç çekişi 1,5A’yı geçmemelidir. Her grup, yazılım kontrolü altında ayrı ayrı anahtarlanır.
Spektrum / DSM R/C arayüzü, yukarıdaki grupların herhangi birinden değil, kendi regülatöründen güç alır. Bu port, Spektrum / DSM bağlamanın uygulanabilmesi için yazılım kontrolü altında değiştirilir. Spektrum alıcıları genellikle ~25mA çeker.
S.Bus ve CPPM alıcıları, özel bir güç kaynağından güç alır. Lütfen bu güce herhangi bir servo bağlamayın, sadece bir RX kendi başına.
Kapasitör Yedekleme
Hem FMU hem de IO mikro denetleyicileri, Kapasitör destekli gerçek zamanlı saatlere ve SRAM’a sahiptir. Yerleşik yedek Kapasitör, saatin ve SRAM’ın amaçlanan kullanımı için yeterli kapasiteye sahiptir; bu, istenmeyen güç kaybından veya diğer havada yeniden başlatma nedenlerinden düzenli bir şekilde kurtarmaya izin vermek için depolama sağlar. Kondansatörler FMU 3.3V rayından şarj edilir. bu, yalnızca bu özelliği desteklemek için yazılımın mevcut olması durumunda çalışır.
Gerilim, Akım ve Arıza Algılama
Her iki tuğla tarafından bildirilen akü voltajı ve akımı FMU tarafından ölçülebilir. Ek olarak, 5V düzensiz besleme rayı ölçülebilir (karartma koşullarını algılamak için). IO, servo güç rayı voltajını ölçebilir.
Çevresel güç bağlantı noktalarındaki aşırı akım koşulları FMU tarafından tespit edilebilir. Donanım kilidi, bu bağlantı noktalarında kalıcı kısa devrelerden kaynaklanan hasarı önler. Kilitleme, FMU yazılımı tarafından sıfırlanabilir. FMU için düşük/aşırı voltaj süpervizörü, kararma olayları sırasında FMU’yu sıfırlamada tutmak için kullanılan bir çıkış sağlar.
EMI Filtreleme ve Geçici Koruma (normal Taban Kartında, harici olarak sağlanan taban kartları için belirtilmelidir.)
EMI filtreleme, yüksek ekleme kayıplı geçiş filtreleri kullanılarak sistemdeki kilit noktalarda sağlanır. Bu filtreler, güç geçişlerini bastırmak için çevresel konektörlerde TVS diyotları ile eşleştirilir.
Güç girişlerinin her birinde ters polarite koruması sağlanır. USB sinyalleri filtrelenir ve birleşik bir sonlandırma/TVS dizisi ile sonlandırılır.
Çoğu dijital çevre birimi sinyali (tüm PWM çıkışları, seri bağlantı noktaları, I2C bağlantı noktası), geçici olaylar veya yanlışlıkla yapılan yanlış bağlantılardan kaynaklanan hasar riskini azaltmak için ESD ile geliştirilmiş arabellekler ve özellikli seri engelleme dirençleri kullanılarak çalıştırılır.
Cube Serisi Arayüz Spesifikasyonu
Bu Belgenin Kapsamı
Bu belge, Cube modül serisinin tüm arabirim standardını ve çekirdek mekanik, elektrik ve harici bağlantı seçeneklerini kapsar. LT (uzun süreli) olarak işaretlenen bölümlerin, aracı otopilot revizyonlarından izole etmek için sabit tutulması amaçlanmıştır.
Arayüz Standardı
Konnektör Serisi
Düşük yoğunluk: Kalıp üzerinde 0.1” Futaba anahtarlı servo konektörler (Mfg. tanımlanacak)
Kablolama: AWG24, şerit veya yuvarlak, ikonik renk şeması
Yığın: Hirose DF17, 80pos , 4 mm istifleme yüksekliği, 0,5 mm aralık, düşmeye dayanıklı
Yüksek yoğunluk: JST-GH 1,25 mm
Kablolama: AWG28, şerit, ikonik renk şeması
Güç Modülü: Hem ana hem de yedek güç için Molex Clik-Mate 2 mm (kartın altında mı?)
Cube
Mekanik: 30×30 mm M3 montaj deliği düzeni, 35×35 mm ayak izi
80 konumlu DF17 konektörü. Tüm otopilot arayüz bağlantılarını taşır.
Minimum (okuyun: gerçekten minimum) elektrik koruması
Güç yönetimi yok
3,8 – 5,7V çalışma (mutlak maksimum değerler)
4.0 – 5.5V çalışma (uyumlu derecelendirme)
Cube GÇ
Toplam bağlantı:
2x I2C
2x CAN: CAN1 ve CAN2
4x UART: TELEM1, TELEM2, GPS (I2C 1 yerleşik), SERIAL4(I2C 2 yerleşik)
1x Konsol: KONSOL (SERIAL5)
1x HMI: USB genişletici
Ana Güç – 6 konumlu (ClikMate 6 konumlu 2.0mm) | Bağlayıcı: GÜÇ1
| Pin # | Adı | I/O | Voltaj | Tel rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VDD_5V_BRICK | IN | 5 V | KIRMIZI/GRİ | Power Brick’ten AP’ye Besleme |
| 2 | VDD_5V_BRICK | IN | 5 V | KIRMIZI/GRİ | Power Brick’ten AP’ye Besleme |
| 3 | BATT_CURRENT_SENS_PROT | 3.3 V | SİYAH | Pil Akımı Konnektörü | |
| 4 | BATT_CURRENT_VOLTAGE_PROT | IN | 3.3 V | SİYAH | Pil Voltaj Konnektörü |
| 5 | GND | – | GND | SİYAH | GND bağlantısı |
| 6 | GND | – | GND | SİYAH | GND bağlantısı |
Yedek Güç – 6 konum | Bağlayıcı: GÜÇ2
| Pin # | Adı | I/O | Voltaj | Tel rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VDD_5V_BRICK | IN | 5 V | KIRMIZI/GRİ | Power Brick’ten AP’ye Besleme |
| 2 | VDD_5V_BRICK | IN | 5 V | KIRMIZI/GRİ | Power Brick’ten AP’ye Besleme |
| 3 | AUX_BATT_CURRENT_SENS | – | 3.3V | SİYAH | Yardımcı Pil Akım Konnektörü |
| 4 | AUX_BATT_VOLTAGE_SENS | IN | 3.3V | SİYAH | Yardımcı Pil Voltaj Konnektörü |
| 5 | GND | – | GND | SİYAH | GND bağlantısı |
| 6 | GND | – | GND | SİYAH | GND bağlantısı |
I2C – 4 konum (1 bağımsız olarak takılı, 1 eski dahili) | Bağlayıcı:I2C2
| Pin # | Adı | I/O | Voltaj | Tel Rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VCC_5V | OUT | 5 V | KIRMIZI/GRİ | AP’den çevre birimine besleme |
| 2 | I2C_2_SCL | IN/OUT | 3.3 V (PULLUPS) | MAVİ/SİYAH | SCL, AP’de Pull-up |
| 3 | I2C_2_SCL | IN/OUT | 3.3 V (PULLUPS) | YEŞİL/SİYAH | SCL, AP’de Pull-up |
| 4 | GND | GND | SİYAH | GND bağlantısı |
CAN (2 takılı) | Bağlayıcı:CAN1, CAN2
| Pin # | Adı | I/O | Voltaj | Tel Rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VCC_5V | OUT | 5 V | KIRMIZI/GRİ | AP’den çevre birimine besleme |
| 2 | CAN_H | IN/OUT | 12 V | SARI/SİYAH | CAN High |
| 3 | CAN_L | IN/OUT | 12 V | YEŞİL/SİYAH | CAN Low |
| 4 | GND | – | GND | SİYAH | GND bağlantısı |
UART GENEL (otomatik pilot tarafı) | Bağlayıcı : TELEM1, TELEM2
| Pin # | Adı | I/O | Voltaj | Tel Rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VCC_5V | OUT | 5 V | KIRMIZI/GRİ | AP’den çevre birimine besleme |
| 2 | MCU_TX | OUT | 3.3 V – 5.0 V TTL | SARI/SİYAH | AP’nin TX’i |
| 3 | MCU_RX | IN | 3.3 V – 5.0 V TTL | YEŞİL/SİYAH | AP’nin RX’i |
| 4 | MCU_CTS (TX) | OUT | 3.3 V – 5.0 V TTL | GRİ/SİYAH | CTS (Clear To Send) |
| 5 | MCU_RTS (RX) | IN | 3.3 V – 5.0 V TTL | GRİ/SİYAH | RTS (Request To Send) |
| 6 | GND | – | GND | SİYAH | GND bağlantısı |
UART GPS (otopilot tarafı, I2C orijinal “Harici” veriyoludur), UART 3 | Bağlayıcı: GPS1
| Pin # | Adı | I/O | Voltaj | Tel Rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VCC_5V | IN | 5 V | KIRMIZI | AP’den GPS’e Tedarik |
| 2 | GPS_RX | OUT | 3.3 V – 5.0 V TTL | SİYAH | AP’nin TX’i |
| 3 | GPS_TX | IN | 3.3 V – 5.0 V TTL | SİYAH | AP’nin RX’i |
| 4 | SCL | IN | 3.3 V | SİYAH | I2C 1 SCL |
| 5 | SDA | IN/OUT | 3.3 V | SİYAH | I2C 1 SDA |
| 6 | BUTTON | OUT | GND | SİYAH | Basınca sinyal GND’ye |
| 7 | IO_LED_SAFET_PROT | OUT | GND | SİYAH | Güvenlik Düğmesi için LED Sürücü |
| 8 | GND | – | GND | SİYAH | GND bağlantısı |
UART 4 (I2C2, orijinal “Dahili” veri yolu) | Bağlantı Noktası: GPS2
| Pin # | Adı | I/O | Voltaj | Tel Rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | VCC_5V | OUT | 5 V | KIRMIZI/GRİ | AP’den GPS’e Tedarik |
| 2 | MCU_TX | OUT | 3.3 V – 5.0 V TTL | SARI/SİYAH | AP’nin TX’i |
| 3 | MCU_RX | IN | 3.3 V – 5.0 V TTL | YEŞİL/SİYAH | AP’nin RX’i |
| 4 | SCL | OUT | 3.3 V – 5.0 V | GRİ/SİYAH | I2C 2 SCL |
| 5 | SDA | IN | 3.3 V – 5.0 V | GRİ/SİYAH | I2C 2 SDA |
| 6 | GND | – | GND | SİYAH | GND Bağlantısı |
UART 5 (Debug), S.Bus çıkışı – FR-SKY TELEM? veya Hata Ayıklama | Bağlantı Noktası: CONS SBUSo
| Pin # | Adı | I/O | Voltaj | Açıklama |
|---|---|---|---|---|
| 1 | S.Bus_Out | OUT | – | S.Bus Sinyal Çıkışı, AP’nin TX’i |
| 2 | MCU_TX | OUT | 3.3 V – 5.0 V TTL | AP’nin TX’i |
| 3 | VDD_SERVO | OUT | Servo Voltajı | Servo ray gerilimi |
| 4 | MCU_RX | IN | 3.3 V – 5.0 V TTL | AP’nin RX’i |
| 5 | GND | – | GND | GND Bağlantısı |
| 6 | GND | – | GND | GND Bağlantısı |
Debug (New Standard Debug) (Digikey PN for housing SM06B-SURS-TF(LF)(SN)-ND)
IO DEBUG
| Pin # | Adı | I/O | Voltaj | Açıklama |
|---|---|---|---|---|
| 1 | VDD 5V PEIPH | OUT | 5 V | 5V |
| 2 | IO_TX | OUT | 3.3 V – 5.0 V TTL | TX of AP IO_uart1 TX |
| 3 | IO_RX | IN | 3.3 V – 5.0 V TTL | RX of AP IO_uart1 RX |
| 4 | IO-SWDIO | I/O | 3.3 V – 5.0 V TTL | Serial wire debug I/O |
| 5 | IO-SWCLK | I/O | 3.3 V – 5.0 V TTL | Serial wire Clock |
| 6 | GND | OUT | GND | GND connection |
FMU DEBUG
| Pin # | Adı | I/O | Voltaj | Açıklama |
|---|---|---|---|---|
| 1 | VDD 5V PEIPH | OUT | 5 V | 5 V |
| 2 | FMU_TX (SERIAL 5) | OUT | 3.3 V – 5.0 V TTL | TX of AP FMU_uart5 TX |
| 3 | FMU_RX (SERIAL 5) | IN | 3.3 V – 5.0 V TTL | RX of AP FMU_uart5 RX |
| 4 | FMU-SWDIO | I/O | 3.3 V – 5.0 V TTL | Serial wire debug I/O |
| 5 | FMU-SWCLK | I/O | 3.3 V – 5.0 V TTL | Serial wire Clock |
| 6 | GND | OUT | GND | GND connection |
Analogue | Port:ADC
| Pin# | Adı | I/O |
|---|---|---|
| 1 | VDD_5V_Periph | OUT |
| 2 | Pressure sense in | IN |
| 3 | GND | GND |
IO USART 1 / DSM / Spektrum | Port:SPKT
| Pin# | Adı | I/O | Voltaj | Açıklama |
|---|---|---|---|---|
| 1 | IO_USART1_RX_SPECTRUM_DSM | IN | IO USART 1 RX, DSM Girişi | |
| 2 | GND | – | GND | GND |
| 3 | VDD_3V3_Spektrum | OUT | 3.3 V | özel Güç Kaynağı |
HMI (Buzzer, USB, LEDs) | Port:USB
| Pin# | Adı | I/O | Voltaj | Tel Rengi | Açıklama |
|---|---|---|---|---|---|
| 1 | V BUS | OUT | 5 V | KIRMIZI/GRİ | USB V BUS |
| 2 | OTG_DP1 | IN/OUT | 3.3 V | YEŞİL/SİYAH | USB Veri Pozitif (D+) |
| 3 | OTG_DM1 | IN/OUT | 3.3 V | KIRMIZI/SİYAH | USB Veri Eksi (D-) |
| 4 | GND | – | GND | SİYAH | GND |
| 5 | BUZZER_OUT | OUT | Batarya voltajı | GRİ/SİYAH | VBAT (8.4 – 42 V) |
| 6 | FMU_LED_AMBER | OUT | SİYAH | Önyükleme / Hata LED’i (FW güncellemeleri) |
Arka Kenar (PCB düzenine uyacak şekilde yeniden düzenlenebilir) | Bağlantı Noktası:RCIN ANA ÇIKIŞ AUX ÇIKIŞI
SERVO HEADER (0.1”, 1/1/15 power layout)
| Pin # | Adı | I/O | Voltaj | Açıklama |
|---|---|---|---|---|
| S – 1 | FMU_CH1_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 2 | FMU_CH2_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 3 | FMU_CH3_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 4 | FMU_CH4_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 5 | FMU_CH5_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 6 | FMU_CH6_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 7 | IO_CH1_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 8 | IO_CH2_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 9 | IO_CH3_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 10 | IO_CH4_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 11 | IO_CH5_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 12 | IO_CH6_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 13 | IO_CH7_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 14 | IO_CH8_PROT | OUT | 3.3 V Servo Sinyali, Servo Ray Gücü | PWM Sinyali |
| S – 15 | PPM_SBUS_PROT | IN/OUT | 3.3 V / 4.5 V Powered | PPM / S.Bus Sinyali |
Cube 80-pin DF17 Konnektör (UZUN VADELİ STANDART!)
| Pin # | Adı | I/O | Açıklama |
|---|---|---|---|
| 1 | FMU_SWDIO | I/O | FMU seri kablo hata ayıklama G/Ç |
| 2 | FMU_LED_AMBER | O | Önyükleme hatası LED’i (yalnızca sürücü, FET tarafından kontrol edilir) |
| 3 | FMU_SWCLK | O | FMU serial wire debug clock |
| 4 | I2C_2_SDA | I/O | I2C Serial Data Tx/Rx |
| 5 | EXTERN_CS | O | Harici SPI için çip seçimi (NC, yalnızca hata ayıklama için) |
| 6 | I2C_2_SCL | O | I2C Serial Clock Signal |
| 7 | FMU_!RESET | I | Reset pin for the FMU |
| 8 | PROT_SPARE_1 | Spare | |
| 9 | VDD_SERVO_IN | I | Power for last resort I/O failsafe |
| 10 | PROT_SPARE_2 | Spare | |
| 11 | EXTERN_DRDY | I | Harici SPI için kesme pimi (NC, yalnızca hata ayıklama için) |
| 12 | SERIAL_5_RX | I | UART 5 RX (Receive Data) |
| 13 | GND | System GND | |
| 14 | SERIAL_5_TX | O | UART 5 TX (Transmit Data) |
| 15 | GND | System GND | |
| 16 | SERIAL_4_RX | I | UART 4 RX (Receive Data) |
| 17 | SAFETY | Güvenlik düğmesi girişi | |
| 18 | SERIAL_4_TX | O | UART 4 TX (Transmit Data) |
| 19 | VDD_3V3_SPEKTRUM_EN | O | Spektrum voltaj regülatörü için etkinleştir |
| 20 | SERIAL_3_RX | I | UART 3 RX (Receive Data) |
| 21 | PRESSURE_SENS_IN | AI | Basınç sensörü, Lazer mesafe bulucu veya Sonar için Analog Sinyal bağlantı noktası |
| 22 | SERIAL_3_TX | O | UART 3 TX (Transmit Data) |
| 23 | AUX_BATT_VOLTAGE_SENS | AI | Aux pil girişi için voltaj algılama |
| 24 | ALARM | O | Buzzer PWM Signal |
| 25 | AUX_BATT_CURRENT_SENS | AI | Aux pil girişi için akım algılama |
| 26 | IO_VDD_3V3 | I | Hata ayıklama için sabitlenmiş IO çip gücü |
| 27 | VDD_5V_PERIPH_EN | O | Çevre Birimleri için voltaj beslemesini etkinleştir |
| 28 | IO_LED_SAFET_PROT | O | IRIS için sabitlenmiş IO-LED_SAFETY (güvenlik LED’i) |
| 29 | VBUS | I | USB VBus (VDD) |
| 30 | SERIAL_2_RTS | UART 2 RTS (Gönderme Talebi) | |
| 31 | OTG_DP1 | I/O | USB Data+ (D) |
| 32 | SERIAL_2_CTS | UART 2 CTS (Göndermek İçin Temizle) | |
| 33 | OTG_DM1 | I/O | USB Data- (M) |
| 34 | SERIAL_2_RX | I | UART 2 RX (Receive Data) |
| 35 | I2C_1_SDA | I/O | |
| 36 | SERIAL_2_TX | O | |
| 37 | I2C_1_SCL | O | |
| 38 | SERIAL_1_RX | I | |
| 39 | CAN_L_2 | I/O | |
| 40 | SERIAL_1_TX | O | |
| 41 | CAN_H_2 | I/O | |
| 42 | SERIAL_1_RTS | ||
| 43 | VDD_5V_PERIPH_OC | I | |
| 44 | SERIAL_1_CTS | ||
| 45 | VDD_5V_HIPOWER_OC | I | |
| 46 | IO_USART_1_TX | O | |
| 47 | BATT_VOLTAGE_SENS_PROT | AI | |
| 48 | IO_USART1_RX_SPECTRUM_DSM | O | |
| 49 | BATT_CURRENT_SENS_PROT | AI | |
| 50 | FMU_CH1_PROT | O | |
| 51 | SPI_EXT_MOSI | O | |
| 52 | FMU_CH2_PROT | O | |
| 53 | VDD_SERVO | I | |
| 54 | FMU_CH3_PROT | O | |
| 55 | VDD_BRICK_VALID | I | |
| 56 | FMU_CH4_PROT | O | |
| 57 | VDD_BACKUP_VALID | I | |
| 58 | FMU_CH5_PROT | O | |
| 59 | VBUS_VALID | I | |
| 60 | FMU_CH6_PROT | O | |
| 61 | VDD_5V_IN_PROT | I | |
| 62 | PPM_SBUS_PROT | I | |
| 63 | VDD_5V_IN_PROT | I | |
| 64 | S.BUS_OUT | O | |
| 65 | IO_VDD_5V5 | O | |
| 66 | IO_CH8_PROT | O | |
| 67 | SPI_EXT_MISO | I | |
| 68 | IO_CH7_PROT | O | |
| 69 | IO_SWDIO | I/O | |
| 70 | IO_CH6_PROT | O | |
| 71 | IO_SWCLK | O | |
| 72 | IO_CH5_PROT | O | |
| 73 | SPI_EXT_SCK | O | |
| 74 | IO_CH4_PROT | O | |
| 75 | IO_!RESET | I | |
| 76 | IO_CH3_PROT | O | |
| 77 | CAN_L_1 | I/O | |
| 78 | IO_CH2_PROT | O | |
| 79 | CAN_H_1 | I/O | |
| 80 | IO_CH1_PROT | O |