HERE+
Here+V2 Kullanım Kalvuzu
Genel Bakış
HEX ve Ardupilot Ekibi tarafından geliştirilen HERE+/HERE+ V2 RTK kiti, ArduPilot için bir yer kontrol istasyonu olan Mission Planner ve ayrıca PX4 ve QGroundControl ile uyumludur. Kit, açık kaynaklı uçuş kontrolörü kullanıcıları için ilk Diferansiyel Küresel Konumlandırma Sistemi (DGPS) modülüdür.
RTK teknolojisi, normal GNSS sistemlerinden çok daha doğru konum tahminleri sağlar. İdeal doğruluğu, uçuşun hassasiyetini büyük ölçüde artıran santimetreye kadar ulaşabilir.
Açık kaynak topluluğu için geliştirilen ilk RTK konumlandırma sistemi olan HERE+’ın kullanımı kolaydır. Here+ GPS kiti, bir taban ve bir gezici ile birlikte gelir. Baz, gereken minimum kurulumla Görev Planlayıcı ile çalışabilir. Gezici ve temel modüller arasındaki veri iletişimi, bir çift telemetri modülü aracılığıyla yapılır (standart Here+ paketinde sağlanmaz).
HERE+/HERE+ V2, daha doğru navigasyon elde etmek için eksiksiz bir Ataletsel navigasyon sistemi (jiroskop, ivmeölçer, pusula ve barometre) ve GNSS verilerine sahiptir. Ardupilot ve PX4 belleniminde, RTK konumlandırma verileri, optimize edilmiş konumlandırma sonucu için yerleşik Genişletilmiş Kalman filtresi (EKF) algoritmasıyla birleştirilir.
Yüksek Hassasiyetli Konumlandırma:
UAV’nin birçok uygulaması, normal GNSS’nin sağlayabileceğinden daha iyi hassasiyete ihtiyaç duyar. Örneğin: İHA ölçme ve haritalama; tarım ölçümü; yüksek hassasiyetli kalkış ve iniş; İHA kaynıyor; vb.
Açık kaynaklı uçuş kontrolörleri The Cube (eski adıyla Pixhawk) 、 ixhawkAPM ile uyumlu RTK Diferansiyel GPS.
- Birden Çok Rover’a 1 Taban Desteği
- Hafif ve Güç Verimli RTK Gerçek Zamanlı DGPS Çözümü
- Santimetre Düzeyinde Konumlandırma ve Navigasyon
Gerçek zamanlı kinematik teknolojisi ile HERE+, gözlem noktasının gerçek zamanlı 3B koordinatını sağlar. Düzeltme için bazın taşıyıcı faz ölçümünü geziciye iletmek. Taşıyıcı fazını GPS ve tabandan sırasıyla karşılaştıran modül, gerçek zamanlı olarak santimetre seviyesinde konumlandırma elde etmek için faz farkını hesaplar.
Standart Here+ Kiti şunları içerir:
HERE+ V1
| Parça | Adet |
| Here+ RTK Rover | 1 |
| Here+ RTK Rover Bağlantı Kablosu | 1 |
| Here+ RTK Base | 1 |
| Here+ RTK Base USB Kablo | 1 |
HERE+ V2
| Parça | Adet |
| Here+ v2 RTK Rover | 1 |
| Here+ RTK Rover Bağlantı Kablosu (seri + I2C) | 1 |
| Here+ RTK Rover Bağlantı Kablosu (CAN) | 1 |
| Rover’ı Yükseltmek için UART-USB Dönüştürücü | 1 |
| Here+ RTK Baz Tabanı | 1 |
| Here+ RTK Baz Tabanı USB Kablo | 1 |
Anten Yerleşimi
Hassas RTK konumlandırması elde etmek için RTK Antenini yerleştirmek çok önemlidir.
RTK’nın çalışma koşulları için, normal GPS’den daha talepkar bazı özel gereksinimler vardır.
En iyi ortam, taban ve gezici antenin ufkun 30 derece üzerinde gökyüzünü net bir şekilde görebilmesini gerektirir. RTK anteni yükseltilebilir ancak etrafta bina, ağaç, araba vb. engellerin olmadığından emin olun.
Kötü çevre örneği: iç mekan, kentsel alan, orman, yere yakın.
İyi çevre örneği: Açık alanlar, dağların zirvesi, binaların çatıları.
Anteni elektronik cihazların yakınına yerleştirmeyin, çünkü yakınlardaki yüksek güçlü elektronik cihazlar GPS sinyalinin radyo frekansı gürültüsünü etkileyebilir. Örnekler, cep telefonu baz istasyonları, yüksek gerilim transformatörleri vb.
Donanım Spesifikasyonu
HERE+ Rover Donanım Parametreleri
| GNSS modülü | Bağlantı |
| u-blox NEO-M8P-0 | HERE+ V1: USB, UART (JST-GH connector), HERE+ V2: UART (JST-GH connector) |
HERE+ Temel Donanım Parametreleri
| GNSS modülü | Seramik Anten | Bağlantı |
| u-blox NEO-M8P-2 | CGGBP.25.4.A.02 | USB, UART, SMA |
| Desteklenen GNSS Sinyalleri | Çalışma ortamı | Çalışma voltajı | Çalışma sıcaklığı |
| GPS L1 C/A,GLONASS L10F, BeiDou B11 | Yükseklik 5000m, Hız 500m/s | 5V | -40℃ ila 85℃ |
İlk Düzeltme Zamanı
| GPS & GLONASS | GPS & BeiDou | GPS | |
| Cold Start | 26S | 28S | 29S |
| Hot Start | 1S | 1S | 1S |
| Aided Starts | 2S | 3S | 2S |
Hasssiyet
| GPS & GLONASS | GPS & BeiDou | GPS | |
| İzleme ve Navigasyon | -160dBm | -160dBm | -160dBm |
| Yeniden Edinim | -160dBm | -160dBm | -160dBm |
| Soğuk Başlangıç | -140dBm | -148dBm | -148dBm |
| Sıcak Başlangıç | -157dBm | -157dBm | -157dBm |
RTK için maksimum Navigasyon güncelleme hızı
| GPS & GLONASS | GPS& BeiDou | GPS |
| 5Hz | 5Hz | 8Hz |
| Anten Destekli | Yatay konum doğruluğu |
| Aktif ve Pasif Anten | RTK 0.025m+1ppm CEP |
| Ebat | Ağırlık | |
| HERE+ Rover | 49mmx49mmx17mm | 49 gr |
| HERE+ Base | 40mmx41mmx11mm | 18.6 gr |
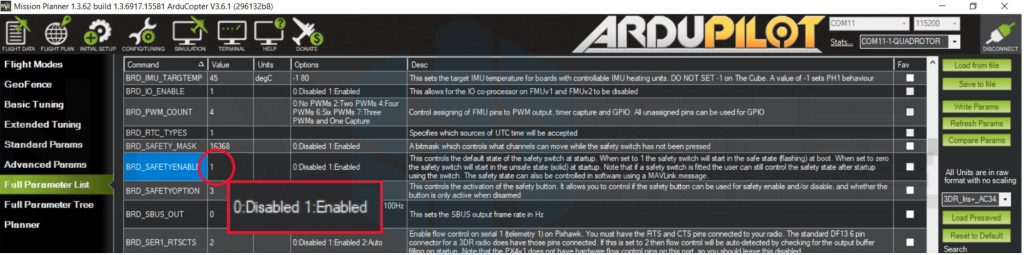
Güvenlik Anahtarı
Motorları ve servo çıkışlarını etkinleştirin/devre dışı bırakın LED sabit yanana kadar güvenlik anahtarına 3 saniye boyunca uzun basın. Motorlar ve servolar daha sonra açılabilir.
LED anlamları:
Sürekli Yanıp Sönme – Sistem Başlatılıyor Aralıklı Yanıp Sönme – Sistem hazır. Motor çıkışını etkinleştirmek için basın
Güvenlik anahtarını Etkinleştir/Devre Dışı Bırak:
Uçuş kontrol cihazını Görev Planlayıcıya bağlayın ve “Yapılandırma” altındaki “Tam Parametre Listesi”ne gidin.
Here+ /Here+ v2 LED Anlamları
Yanıp sönen kırmızı ve mavi: Sensörler başlatılıyor. Sensörleri başlatırken aracı sabit ve düz bir konuma getirin.
Yanıp sönen mavi:Devre dışı, GPS kilidi yok. Otomatik görev, aylaklık ve kalkışa dönüş uçuş modları GPS kilidi gerektirir
Sabit mavi: GPS kilidi olmadan silahlı
Yanıp sönen yeşil:Devre dışı bırakıldı (kurmaya hazır), GPS kilidi alındı. Silahlı durumdan silahsızlanırken hızlı çift ton.
Hızlı Yanıp Sönen yeşil: Yukarıdakiyle aynı, ancak GPS SBAS kullanıyor (bu nedenle daha iyi konum tahmini olmalıdır)
Sabit yeşil: devreye alma sırasında tek uzun ton ile: Devrede, GPS kilidi alındı. Uçmaya hazır!
Çift yanıp sönen sarı: Ön kol kontrolleri başarısız (sistem kurmayı reddediyor)
Tek Yanıp sönen sarı: Radyo arıza güvenliği etkinleştirildi
Yanıp sönen sarı – hızlı bip sesiyle: Pil arıza güvenliği etkinleştirildi
Yanıp sönen sarı ve mavi- yüksek-yüksek-yüksek-düşük ton dizisiyle (dah-dah-dah-doh): GPS arızası veya GPS arıza güvenliği etkinleştirildi
Yanıp sönen kırmızı ve sarı:EKF veya Ataletsel Gezinme hatası
Yanıp sönen mor ve sarı: Barometre arızası Sabit Kırmızı: Hata, genellikle SD karttan kaynaklanır (çözmek için SD kartı yeniden takın veya yerleştirin), MTD veya IMU, SD kartı kontrol edebilir ve BOOT.txt dosyasına göz atabilirsiniz. önyükleme mesajı analizi
SOS ton sırası ile sabit kırmızı: SD kart eksik veya SD kart bozuk format
Güç açıkken ışık yok: Firmware yok, bellenim kayboldu, SD kart eksik veya bozuk format (ac3.4 veya daha yüksek sürüm)
Yazılım güncellemesi
Güncellemeden önce mevcut donanım yazılımı sürümünüzü kontrol edin Mevcut Temel/Rover Donanım Yazılımı Sürümünü Kontrol Edin
HERE + modüllerinin varsayılan donanım yazılımı sürümü, ublox-1.10 donanım yazılımıdır. 1.30 aygıt yazılımının yeni sürümü, RTK işlemleri için diğer uydu sistemlerini (Glonass / Beidou) GPS ile birleştirerek RTK konumlandırma doğruluğunu etkin bir şekilde artıran yeni bir özellik içerir. Bu nedenle, tüm kullanıcıların HERE+’ı kullanmadan önce 1.30 donanım yazılımına yükseltmeleri önerilir. Bu kılavuzun hazırlanması sırasında firmware’in ublox-1.40 versiyonu da yayınlanmıştır. 1.40 sürümü bellenim, mobil baz istasyonu adı verilen yeni bir özelliği tanıttı, yani baz istasyonunun bir yere sabitlenmesi gerekmiyor. Örneğin, hareket halindeki bir araca veya tekneye bir baz istasyonu yerleştirilebilir. Ublox-1.40 sürümüne yükseltme, 1.30 sürümüne yükseltmeye benzer. Mobil temel özelliğini kullanması gerekmeyen kullanıcılar için 1.30 sürümüne yükseltme yeterlidir.
U-centre UI ve 1.30 Firmware’i İndirme
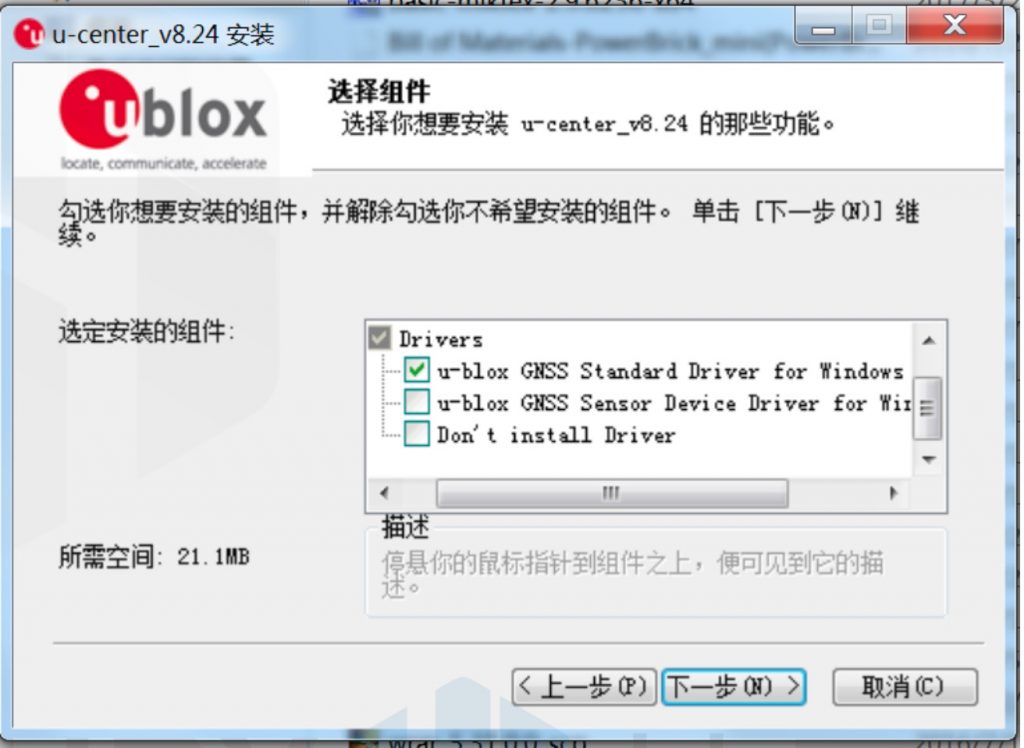
Ürün yazılımını yükseltmek, Ublox’un Windows yazılımı U-center’ın kullanılmasını gerektirir. U-center’ı indirmek için lütfen resmi web sitesine gidin
Ardından U-cent yazılımını yüklemek için talimatları izleyin. Yükleme işlemi sırasında, aygıt Sürücüsünü yüklemeniz istenecektir, lütfen aşağıda gösterildiği gibi yalnızca Windows için Standart Sürücünün işaretlendiğinden emin olun. (daha yeni güncellemelerde, yalnızca 1 seçilebilir sürücü olacaktır)
Bellenimi Alın
Ayrıca buradan bellenimi indirmeniz gerekecek Seçeneği tıklayın: u-blox M8 Flash Firmware 3.01 HPG 1.30
YALNIZCA Yüksek Hassasiyetli GNSS ürünleri için.
HERE+ Base ve Rover’ınızı Bilgisayara Bağlayın
Baz istasyonu modülünü yükseltirken, aşağıdaki fotoğrafta gösterildiği gibi baz istasyonu modülünü bilgisayarın USB arayüzüne bağlamak için USB kablosunu kullanın:

Here+ V1 gezici modülünü yükseltirken (Here+ V2 yükseltmesi için lütfen sonraki bölüme bakın), kasayı açmak için altıgen bir tornavida kullanın. Gezici modülün, temel modüle benzer bir USB arabirim konektörü vardır, geziciyi bilgisayara bağlamak için temel modül USB kablosunu kullanabilirsiniz. Ek olarak, aygıt yazılımı yükseltme işlemi sırasında, aşağıdaki fotoğrafta gösterildiği gibi, gezici modülün uçuş kontrolörüne bağlanarak çalıştırılması gerekir:

Yükseltme Süreci
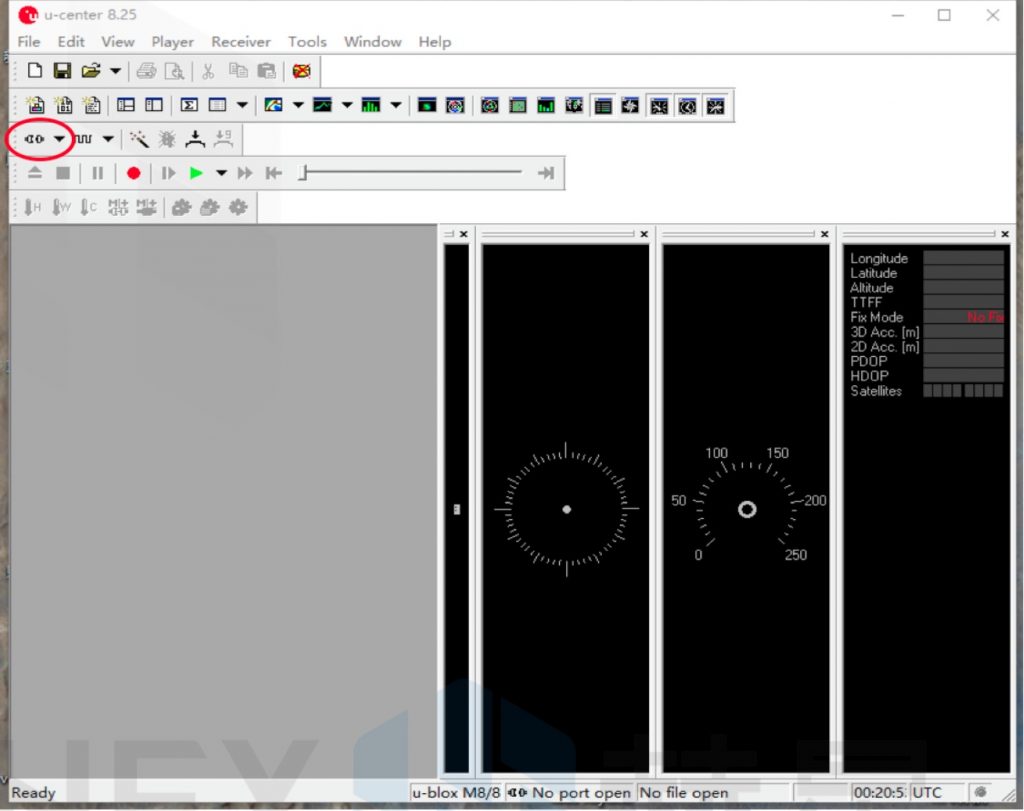
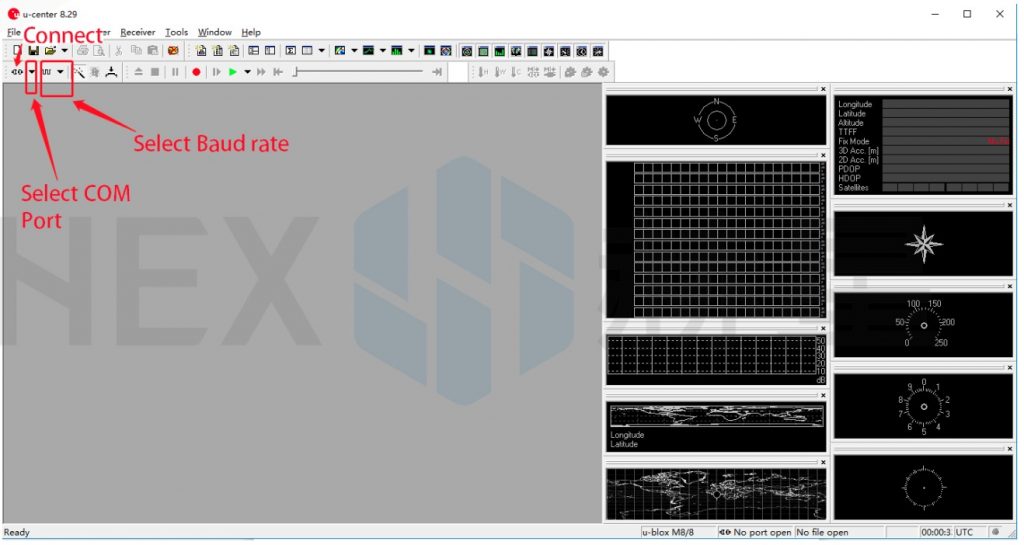
U-center yazılımını açın, bağlantı düğmesine tıklayın (kırmızı daire içinde gösterildiği gibi), baz/rover modülünüze karşılık gelen com portunu seçin. Lütfen bağlantı noktasının başka bir yazılıma bağlanmaması gerektiğini unutmayın, aksi takdirde bağlantı noktası meşgul olur ve kullanılamaz.
“Araçlar → u-blox 5 – 8 Flash Firmware Güncellemesi’ne tıklayın ve aşağıda gösterildiği gibi ayarlara tıklayın:
Daha yüksek sürümlerde, “u-blox 5 – 8 Flash Firmware Güncellemesi”, “eski firmware güncellemesi” olarak değiştirilmiştir, lütfen yazılım sürümüne göre çalıştırın.
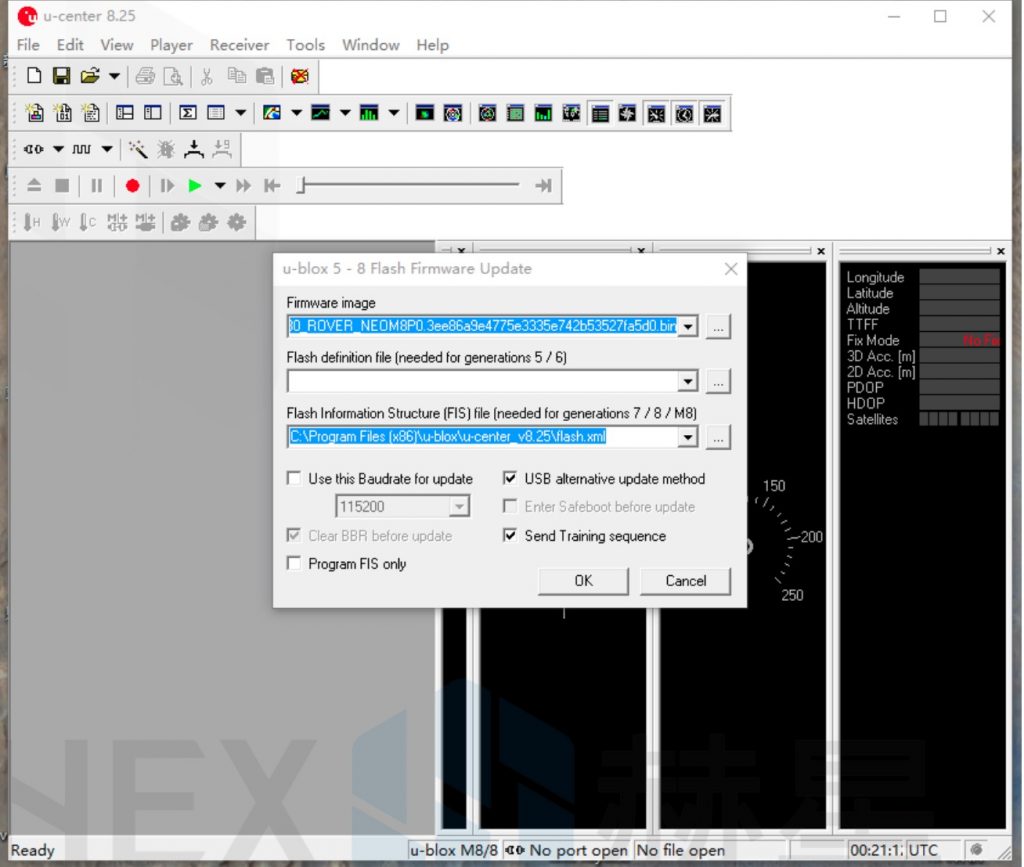
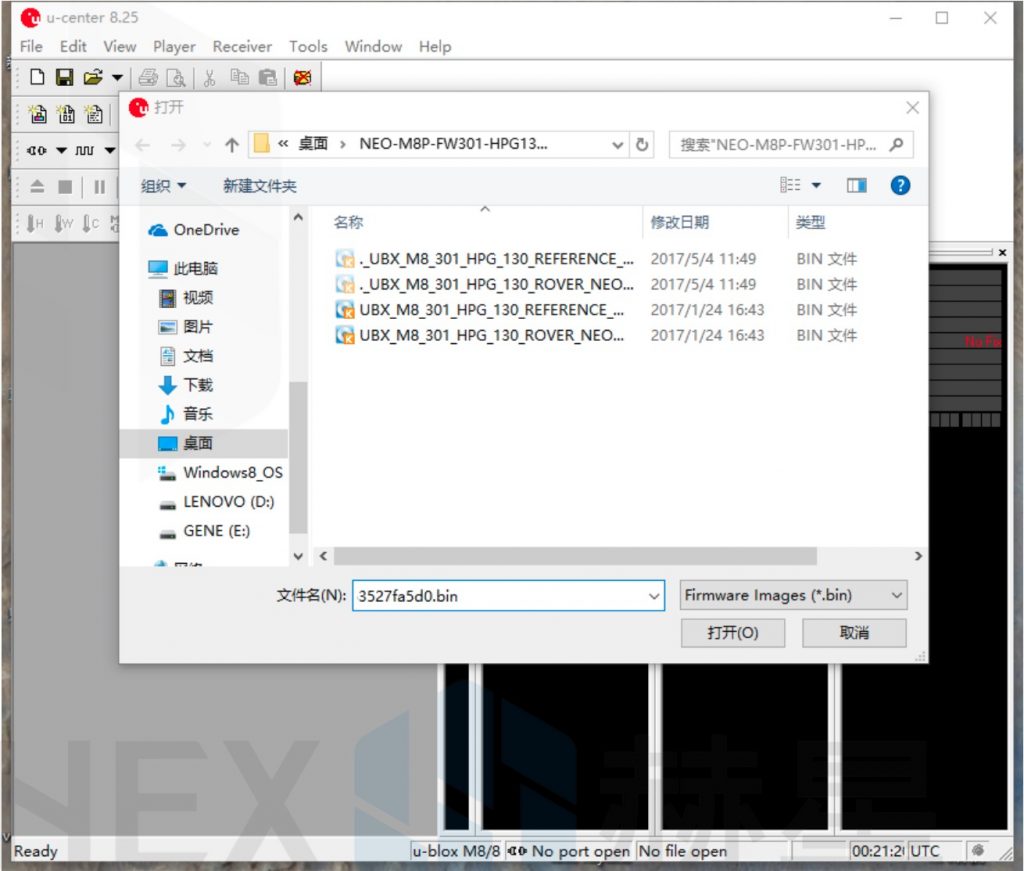
Firmware görüntüsünde, sıkıştırılmış dosyayı açın ve indirilen 1.30 Firmware’i seçin.
Temel modül için, şu başlıklı bellenimi seçin: UBX_M8_301_HPG_130_REFERENCE_NEOM8P2.59a07babb501ba6a89ff87cac2f 2765f.bin
Gezici modülü için aygıt yazılımını seçin: UBX_M8_301_HPG_130_ROVER_NEOM8P0.3ee86a9e4775e3335e742b53527fa5 d0.bin
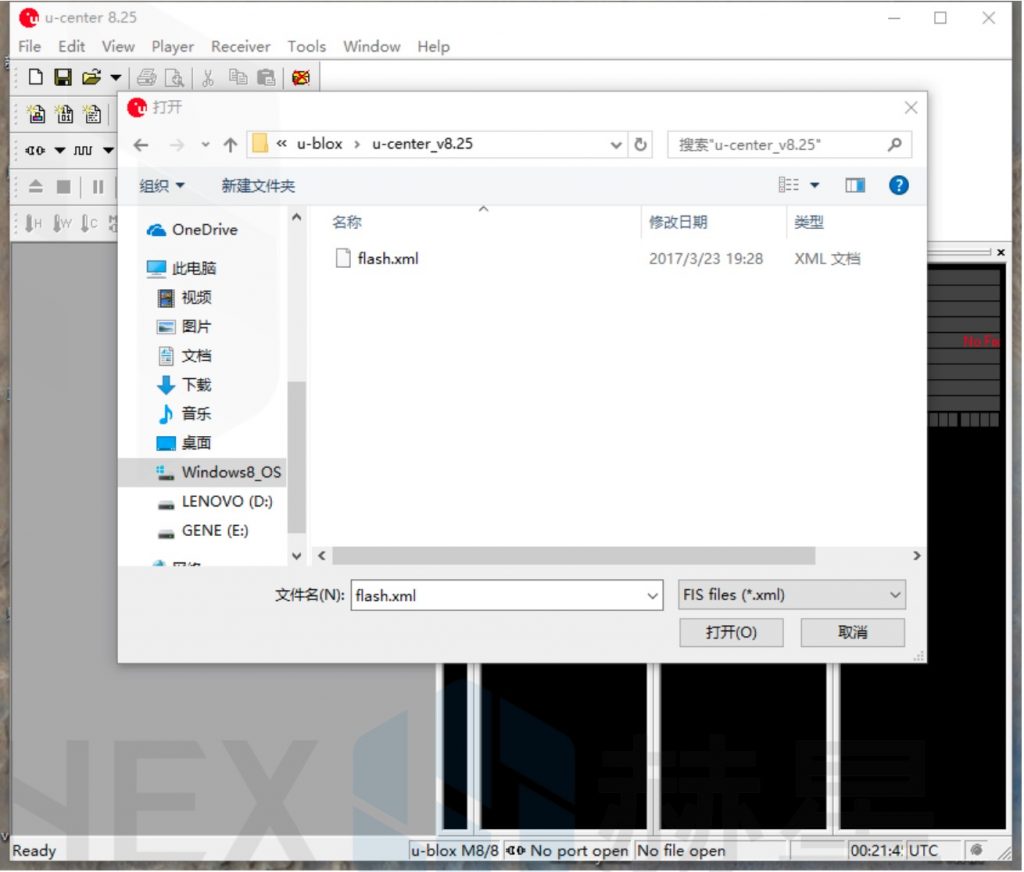
Flash Bilgi Yapısı(FIS) Dosyasında, Ucentre yazılımının kurulum adresinde bulunan Flash.xml’i seçin (U-center_v8.25→flash.xml).
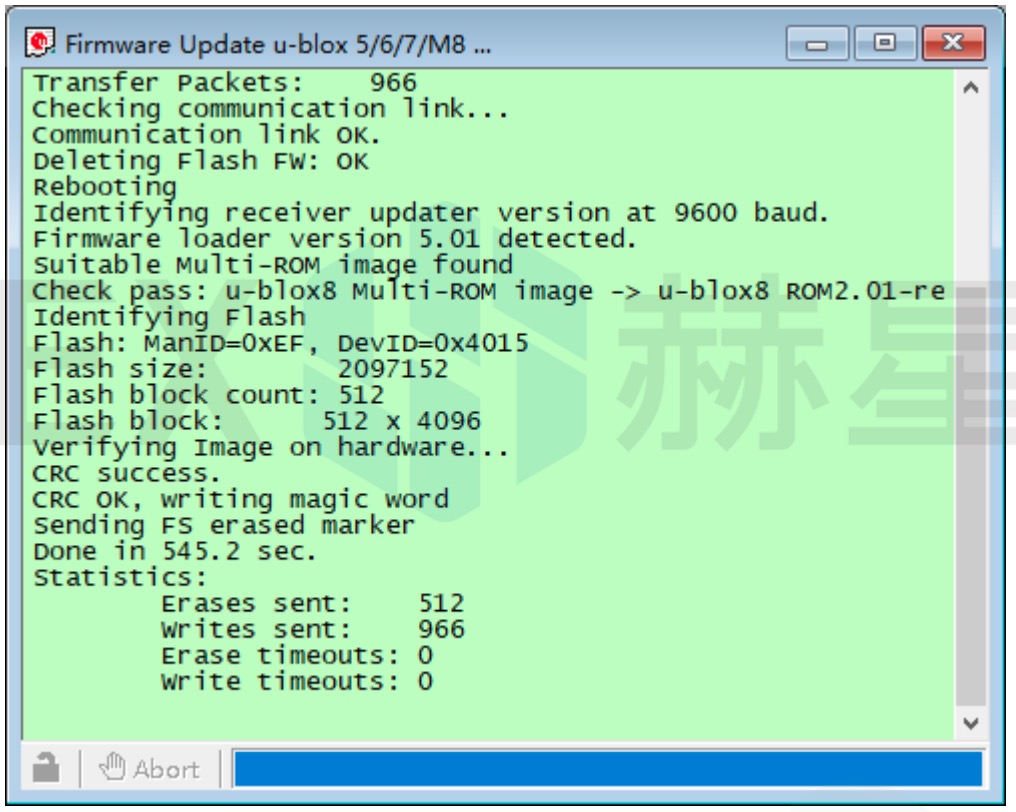
“Tamam” ı tıklayın ve ürün yazılımı yüklemesinin tamamlanmasını bekleyin. Here+ V1 için yükleme işlemi genellikle yalnızca bir dakika veya daha kısa sürer. Here+ V2 daha uzun sürecektir. Yükleme başarılı olursa yükseltme arayüzü yeşil renkte görüntülenir; yükseltme iptal edilirse, arayüz kırmızı renkte görüntülenir. İşlem kesintiye uğrarsa veya uzun süre yanıt vermiyorsa, modüllerin yeniden başlatılması ve yeniden yükleme yapılması gerekecektir.
Mevcut Rover/Base Donanım Yazılımı Sürümünü Kontrol Edin
Baz/rover zaten U-center’a bağlı olduğunda, Görünüm’e tıklayın, “Görünüm → Mesaj Görünümü → UBX → MON → VER” seçeneğine gidin. Aşağıdaki arayüzü göreceksiniz:
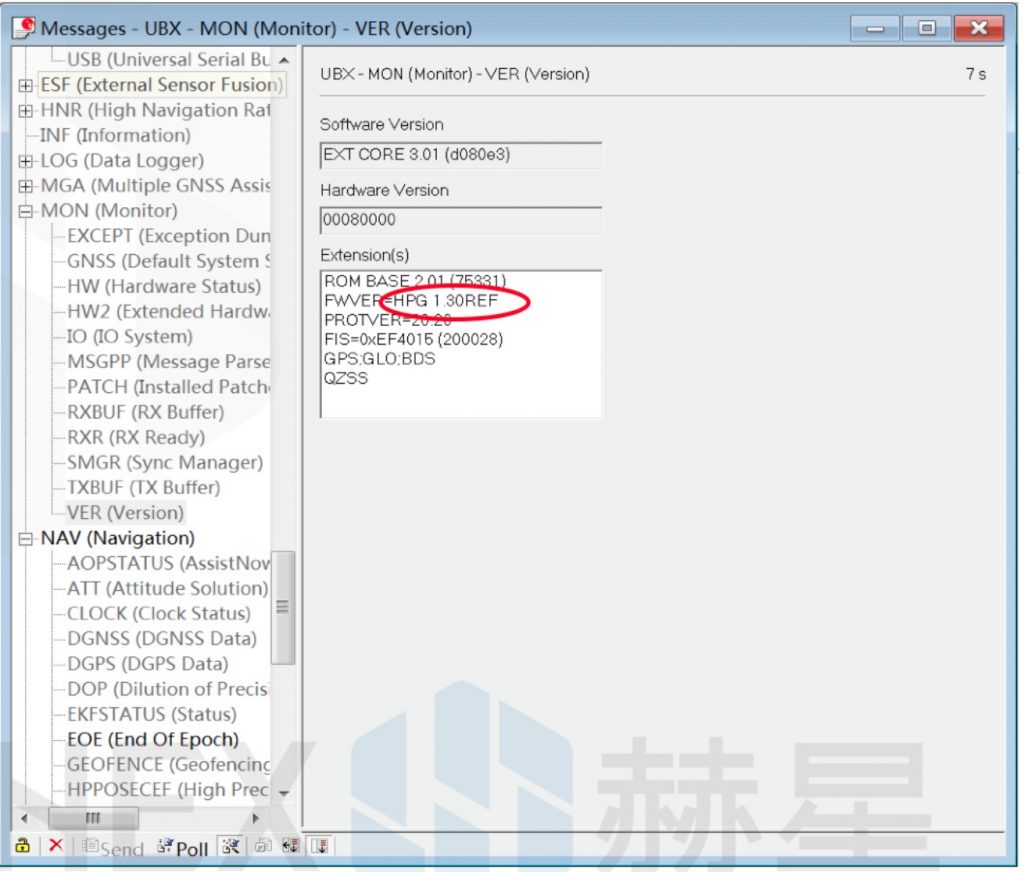
Şekilde gösterildiği gibi, mevcut bellenim sürümü FWVER = HPG 1.30 REF’dir, bu da mevcut bellenim sürümünün temel modül için 1.30 olduğunu gösterir.
Here+ V2 Donanım Yazılımı Güncellemesi
Hazırlık
Araçlar
UART-USB dönüştürücü
kablolar
Altıgen tornavida

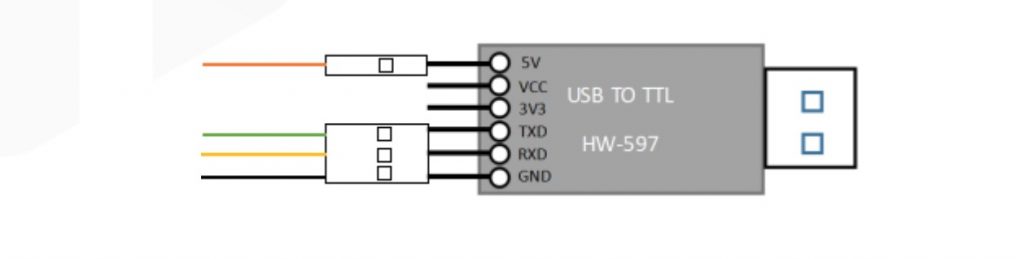
Kabloyu UART-USB dönüştürücü ile bağlayın. Kırmızı kabloyu 5V pinine ve siyah kabloyu GND pinine bağlayın.
Here+ v2’nin kapağını altıgen tornavidayla çıkarın (Tokayı çıkarmak için basılı tutmanız gerekir). Ardından kabloyu değiştirin.
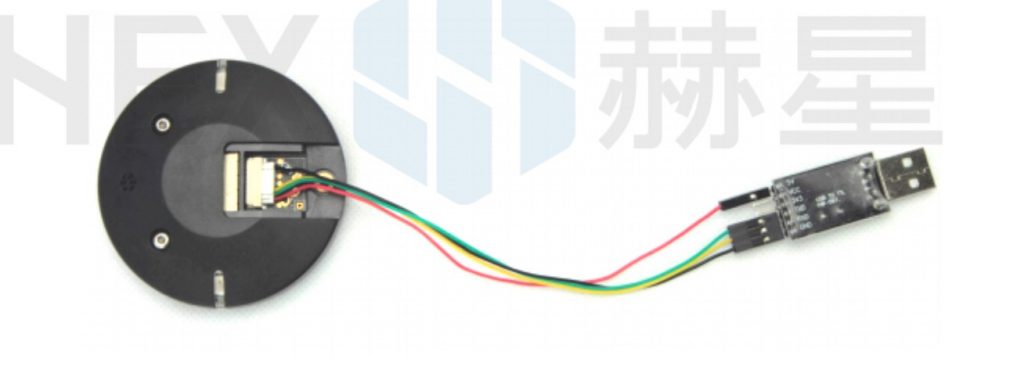
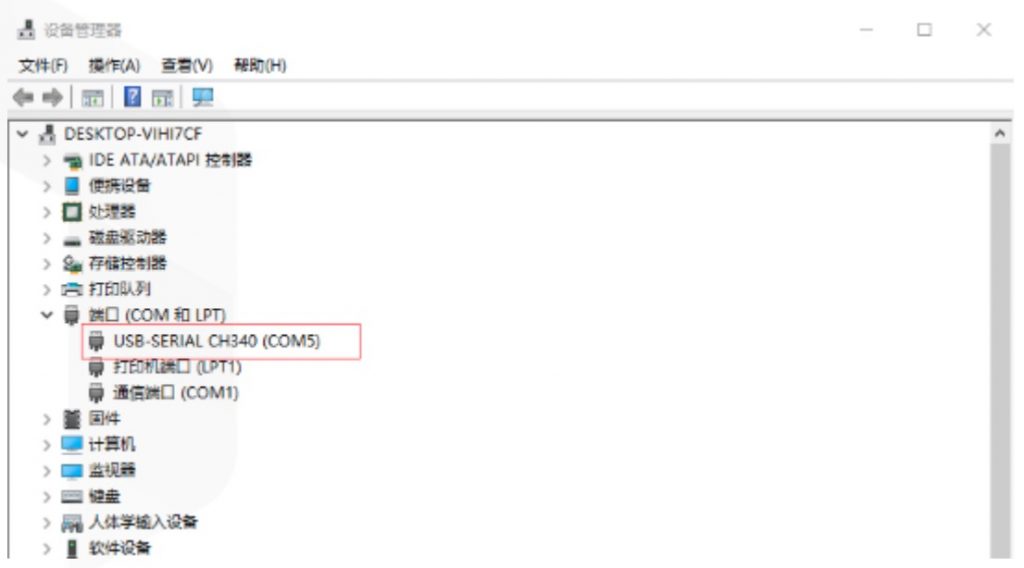
Konektörü bilgisayarın USB bağlantı noktasına takın. Aygıt yöneticisinden tüm sürücülerin hazır olup olmadığını kontrol edin. Değilse, sürücüler buradan indirilebilir: bağlayıcı sürücüsünü indirme bağlantısı
Doğru sürücü “USB-SERIAL CH340(COM#)” olmalıdır
“#” karşılık gelen bağlantı noktası numarasıdır.
U-center’ı açın ve konektör için COM bağlantı noktasını seçin. Baud hızını 9600’e ayarlayın ve ardından bağlanın.
Bağlantıdan sonra, bellenim güncelleme kullanıcı arayüzüne girmek için “Araçlar>eski bellenim güncellemesi” öğesini seçin. “USB alternatif güncelleme yöntemi” seçeneğini işaretleyin ve güncellenecek bellenimi seçin. (Here+ ve Here2+ için aygıt yazılımı aynıdır, lütfen burada+ güncelleme prosedüründen ayrıntılı prosedürlere bakın). Güncellemeye başlamak için Tamam’a tıklayın.
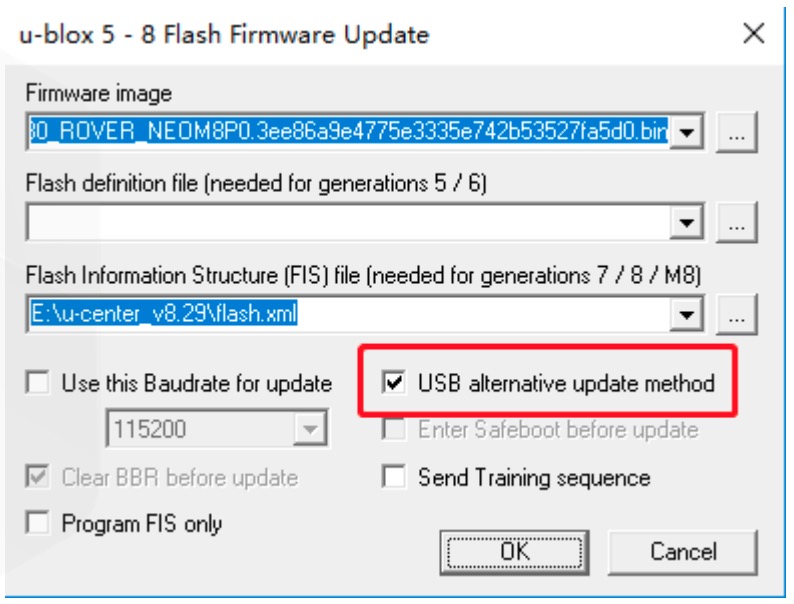
İlerleme çubuğunun bitmesini bekleyin. Pencere yeşile dönerse, güncelleme başarılıdır.
Güncelleme penceresi göründükten sonra bağlantı başarısız olursa, lütfen baud hızını 115200 olarak değiştirin ve ardından iki kez güncelleyin (ilk yeniden denemede hala başarısız olabilir, bu yüzden lütfen iki kez yeniden deneyin).
Temel Kullanım Kılavuzu
Bu talimatlar, Windows’ta Mission Planner kullanılarak kuruluma odaklanır, ancak HERE+, QGroundControl tarafından da desteklenir.
Görev Planlayıcı tarafından Üs/Gezi Araştırması
Eğitimin bu bölümü, kullanım talimatları için Mission Planner yer kontrol yazılımını ve Arducopter-3.5 uçuş kontrol donanım yazılımını kullanır. QGroundControl ve PX4 üretici yazılımı kullanıyorsanız, lütfen şunu okuyun: https://docs.px4.io/en/advanced_features/rtk-gps.html
Operasyon öncesi hazırlık
HERE+’ı bir UAV’de kullanmak için aşağıdaki donanıma ihtiyacınız vardır: Bilgisayar, telemetri modülleri, Here+ gezici modül, Here+ Ana Anten, Here+ Taban, Tripod(Stand)
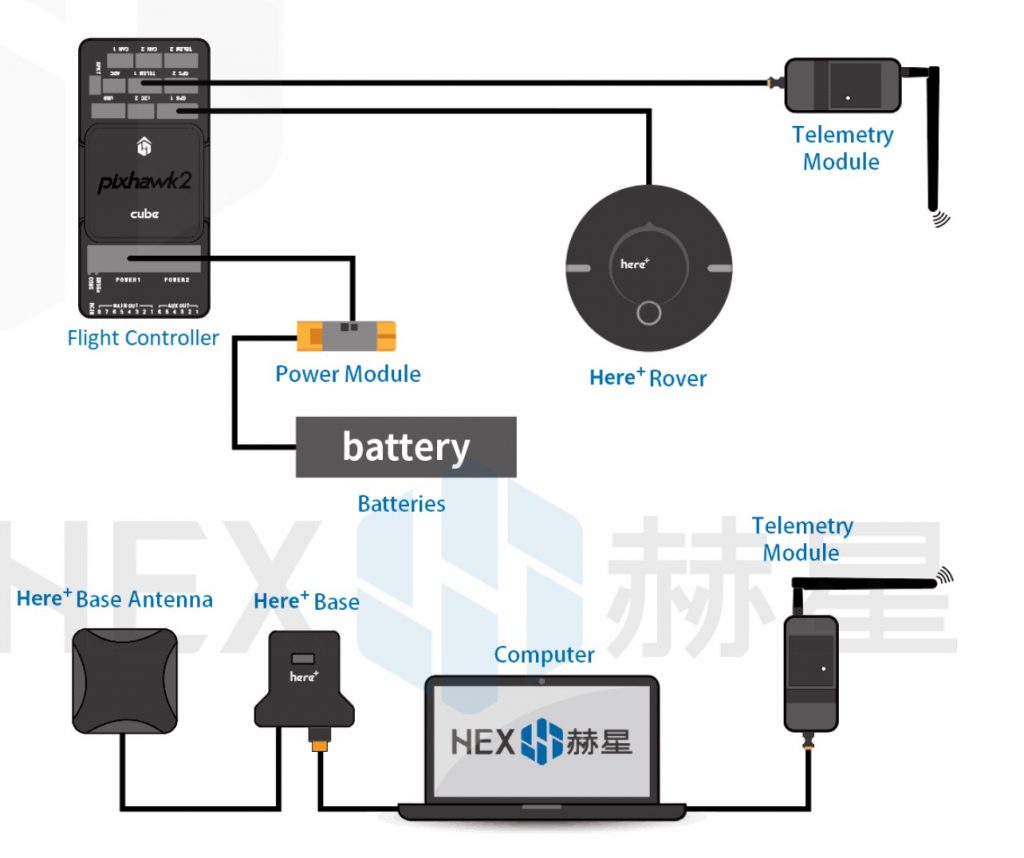
Kullanmadan önce donanımın doğru şekilde bağlandığından emin olun:
Zemin tarafı: Baz istasyonu modülü, USB bağlantı noktası aracılığıyla bilgisayar bağlantı noktasına bağlanır; aynı bilgisayarın başka bir USB bağlantı noktasına bir telemetri modülü bağlı.
İHA tarafı: HERE + gezici modülü, uçuş kontrol cihazı GPS konektörüne bağlanır; telemetri modülü TELEM arayüzüne bağlanır.

İyi bir uydu sinyali elde etmek için lütfen baz istasyonunu yeterli gökyüzü kapsama alanına sahip bir dış ortama yerleştirin. Baz istasyonunu tripod gibi sabit ve yükseltilmiş bir platform üzerine yerleştirin.

Görev Planlayıcı kullanarak Temel Modül Ayarı
Önce temel modül kurulumuyla başlayın. Baz istasyonu kurulumu sırasında gezici ve UAV’nin açılmasına gerek yoktur.
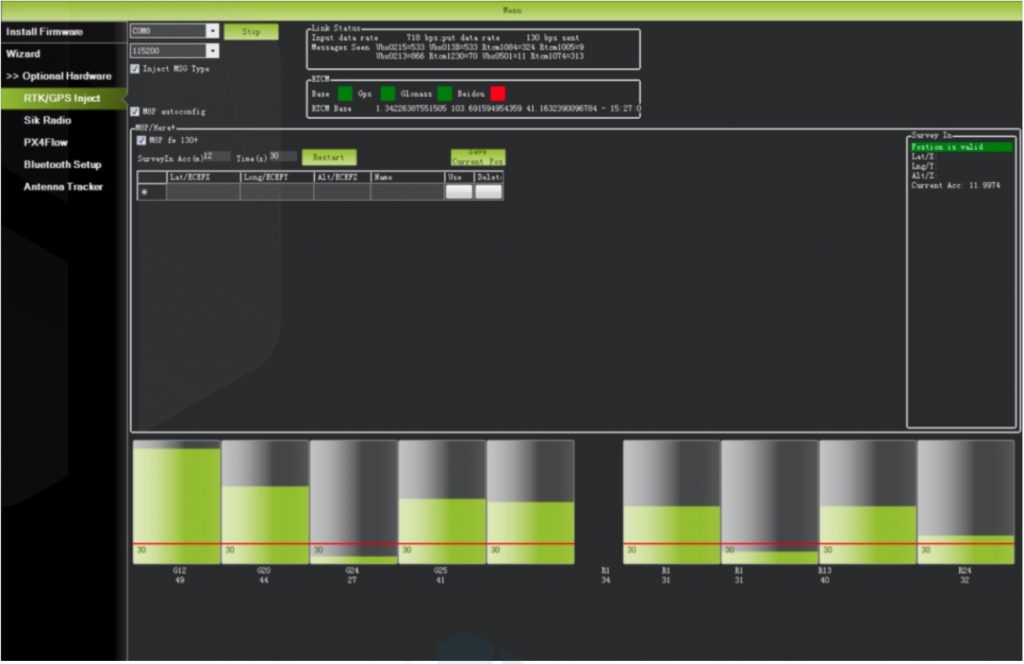
Bilgisayarınızda Mission Planner yer istasyonu yazılımını açın ve “ilk kurulum → Opsiyonel Donanım → RTK/GPS Inject” seçeneğine gidin. Aşağıdaki sayfayı göreceksiniz:
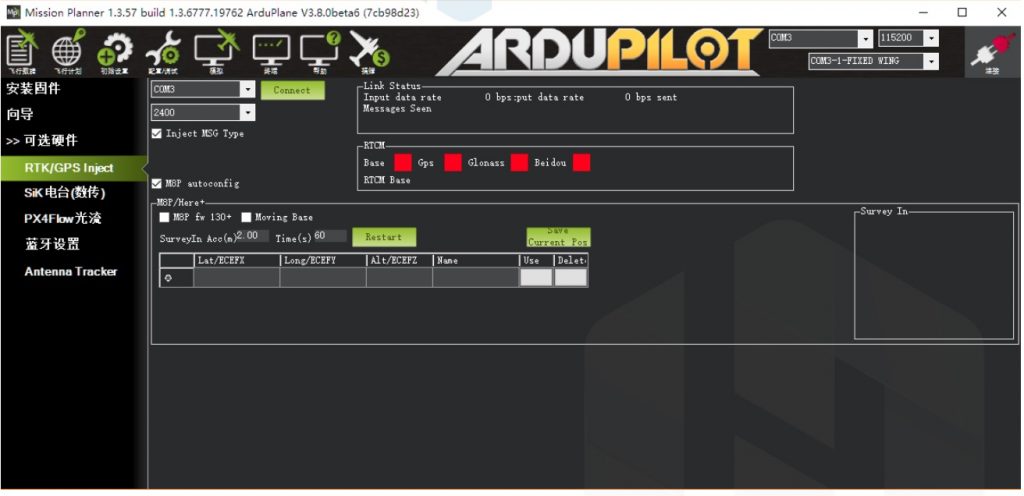
Sol üst köşede doğru temel modül com portunu seçin ve bağlan’a tıklayın. SurveyIn Acc bölümünde, HERE + baz istasyonunuzun elde etmesini beklediğiniz mutlak coğrafi doğruluğu girin. Zaman sütununa beklediğiniz minimum anket süresini girin. Yeniden Başlat’a tıklayın, yer istasyonu girdiğiniz verileri HERE + baz modülüne aktaracak, baz modülü yeni bir ölçüm turu başlatacaktır. Aşağıdaki sayfayı göreceksiniz:
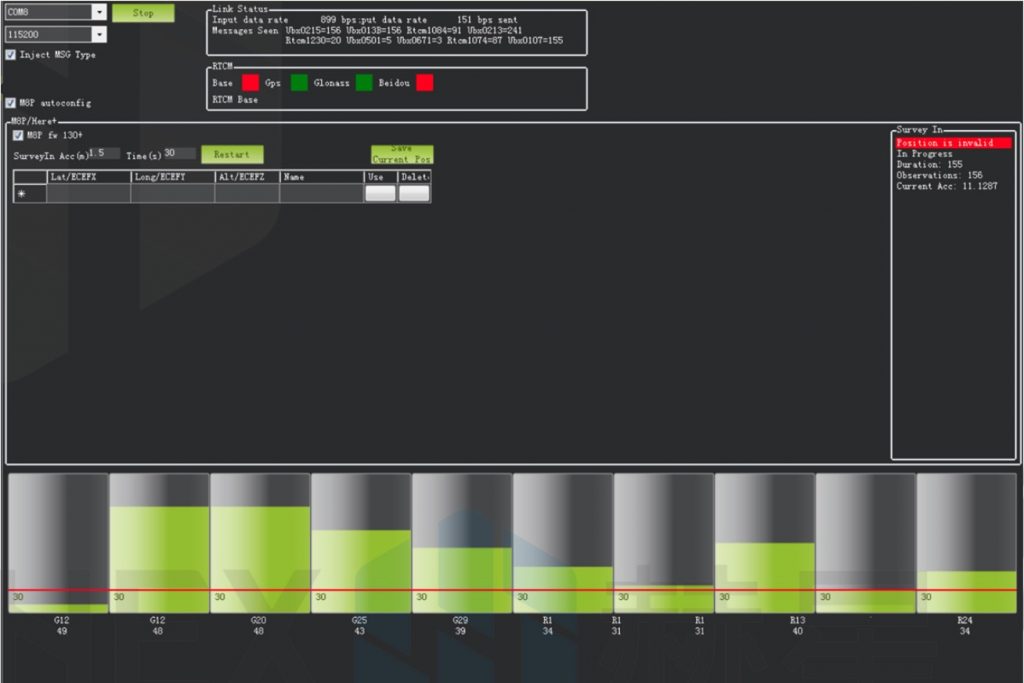
Anket işlemi sırasında, sağdaki kutu mevcut anket durumunu gösterecektir: Konum geçersiz: baz istasyonu henüz geçerli bir konuma ulaşmadı;
Devam Ediyor: anket hala devam ediyor;
Süre: Mevcut ölçme görevinin yürütüldüğü saniye sayısı;
Gözlem: elde edilen gözlem sayısı;
Current Acc: Mevcut baz istasyonunun ulaşabileceği mutlak coğrafi doğruluk;
Görev Planlayıcı sayfasının alt kısmındaki yeşil çubuk, algılanan uyduları ve her bir uyduyla ilgili sinyal gücünü gösterir.
Baz istasyonunun, girişinizin doğruluk gereksinimlerini karşılaması için belirli bir süreye ihtiyacı vardır. Testler, korumasız açık bir alanda 2m’lik mutlak doğruluğu elde etmenin birkaç dakika sürdüğünü göstermektedir; 30 cm’den daha az mutlak doğruluğa ulaşmak yaklaşık bir saat sürer; 10cm hassasiyete ulaşmak birkaç saat sürer.
Buradaki baz istasyonunun mutlak coğrafi doğruluğunun, baz istasyonu ile gezici arasındaki bağıl doğruluğu etkilemeden gezici modülünün mutlak coğrafi doğruluğunu etkileyeceği belirtilmelidir. Uygulamanız yüksek mutlak coğrafi doğrulukla UAV gerektirmiyorsa, baz istasyonunun hassasiyetini çok yüksek ayarlamanıza gerek yoktur, bu da uzun araştırma süresine neden olur.
Baz istasyonunun doğruluğu 1,5 ile 2 m arasında olsa bile gezici modülün baz istasyonuna göre konum doğruluğu yine de santimetre seviyesine ulaşabilir.
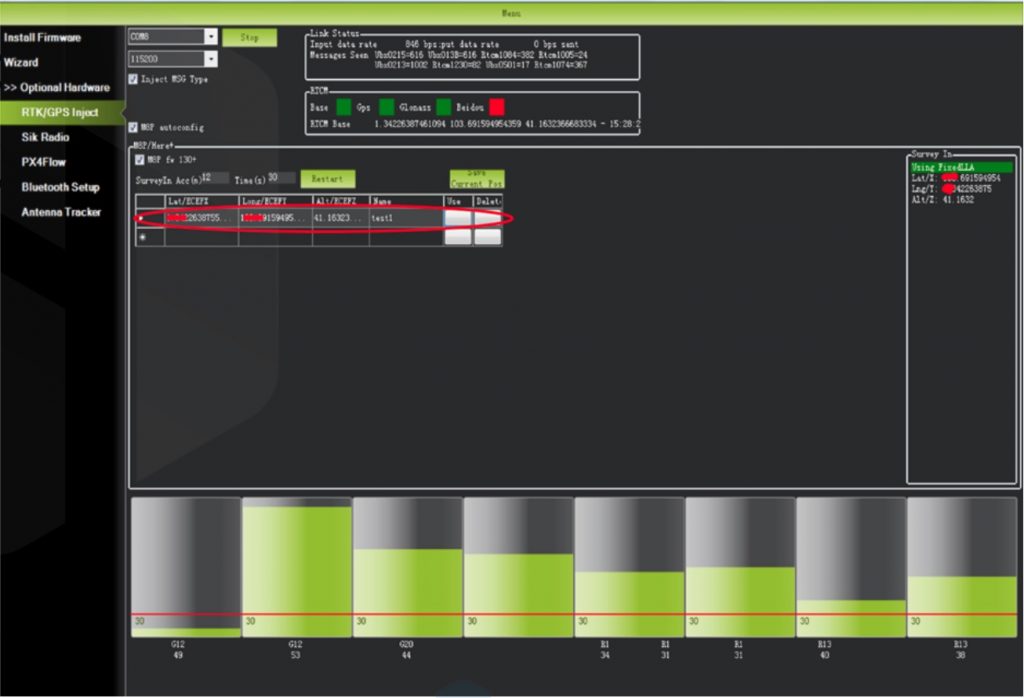
Anket tamamlandıktan sonra, Görev Planlayıcı aşağıdaki sayfayı görüntüleyecektir:
RTCM kutusunda, temel durum göstergesinin yeşil olduğunu ve hem GPS hem de Glonass uydu sistemlerinin yeşil olduğunu gösterir (uydu sistemini değiştirmek istiyorsanız, aşağıdaki bölüme bakın). Sağdaki kutuda “Pozisyon geçerli” yazıyor.
Mevcut konumu Görev Planlayıcıda saklamak için: “Mevcut Konumu Kaydet”e tıklayın, iletişim kutusuna bir ad girin ve “Tamam”a tıklayın. Aşağıda gösterildiği gibi, kayıtlı konumunuzu listede görebilirsiniz. Kaydettiğiniz konum için “Kullan” düğmesini tıklayın. Baz istasyonu sabit moda girecek ve durum “SabitLLA Kullanılıyor” gösterecektir. İleride baz istasyonunu aynı lokasyona kurarsanız tekrar anket yapmanıza gerek kalmaz, kaydettiğiniz lokasyona karşılık gelen “Kullan” butonuna tıklamanız yeterlidir.
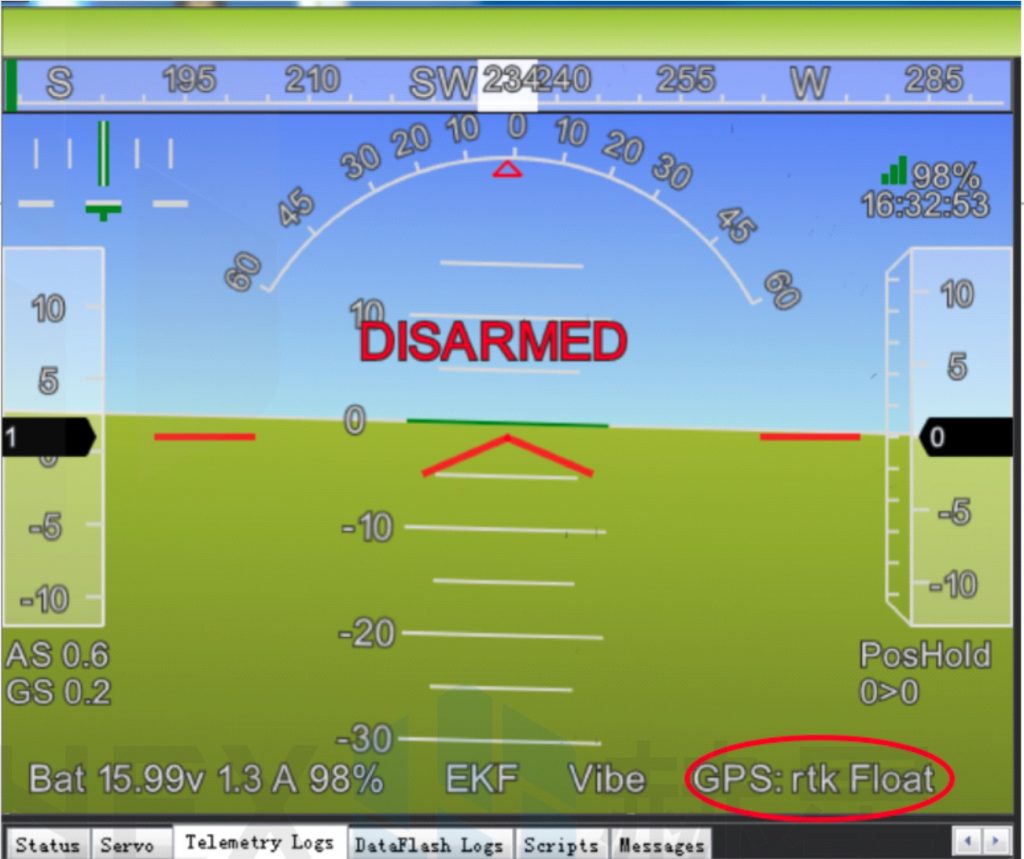
Rover Modülü ve Uçuş Kontrol Cihazı Kurulumu
Baz istasyonu kurulduktan sonra İHA’yı açabilirsiniz. Telemetri modülünü bağlamak için aynı Görev Planlayıcıyı kullanarak, baz istasyonu verileri telemetri modülü aracılığıyla İHA üzerindeki HERE + gezici modülüne iletilecektir. Görev Planlayıcı ana sayfasında, İHA’nın konumlanmasının RTK moduna girdiğini belirten RTK Float / RTK Sabit / 3D RTK olarak görüntülenen mevcut GPS durumunu görebilirsiniz. RTK Float bir kayan nokta çözümüdür; RTK Sabit, sabit bir çözümdür. RTK Sabit modu daha yüksek bir doğruluğa sahiptir ve daha iyi sinyal gücü gerektirir. 3D RTK, Mission Planner Çince versiyonunda RTK Float / RTK’nın birleşik bir ifadesidir.
Tek Tabandan Birden Çok Rover’a
Bunu yapmanın 2 yöntemi vardır:
1) Birden çok telemetri yayınına 1 telemetri kullanın; veya
2) USB hub ile birden fazla 1’e 1 telemetri modülü kullanın
Yer istasyonu konfigürasyonu: tüm telemetri modüllerini bilgisayara USB hub aracılığıyla bağlayın. Üssü bulmak için Görev Planlayıcı’yı açın ve ardından uçuş kontrolörlerine bağlayın. Aşağıda gösterildiği gibi OTOMATİK bağlanmayı seçin. Limanlardaki tüm tanınan uçuş kontrolörleri bağlanacaktır. Aşağıdaki açılır listeden İHA’yı seçebilirsiniz:
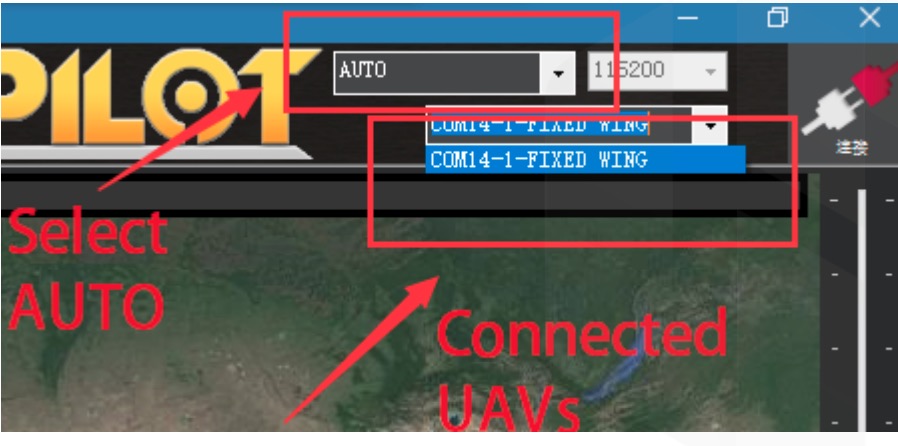
İHA’ları 1 telemetri modülü ile bağladıysanız, aynı COM portunu paylaşmaları gerekir:
Canlı Veri Kaydı/Tekrar Oynatma için U-center’ı kullanın
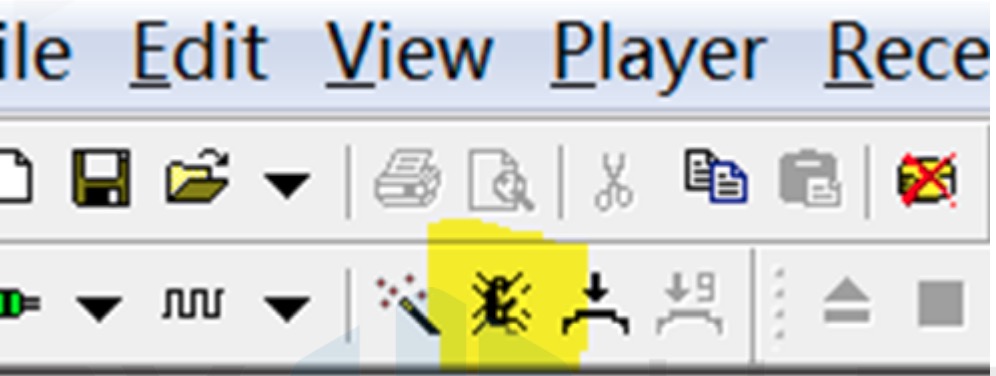
U-center’ın bir işlevi, daha sonraki analiz için temel / gezici modül verilerini kaydetmektir. İlk olarak, baz veya gezici modül zaten U-center’a bağlıysa (aynı şekilde aygıt yazılımı güncellenirken bağlıysa), “hata ayıklama mesajını” açmak için aşağıdaki hata simgesine tıklayın:
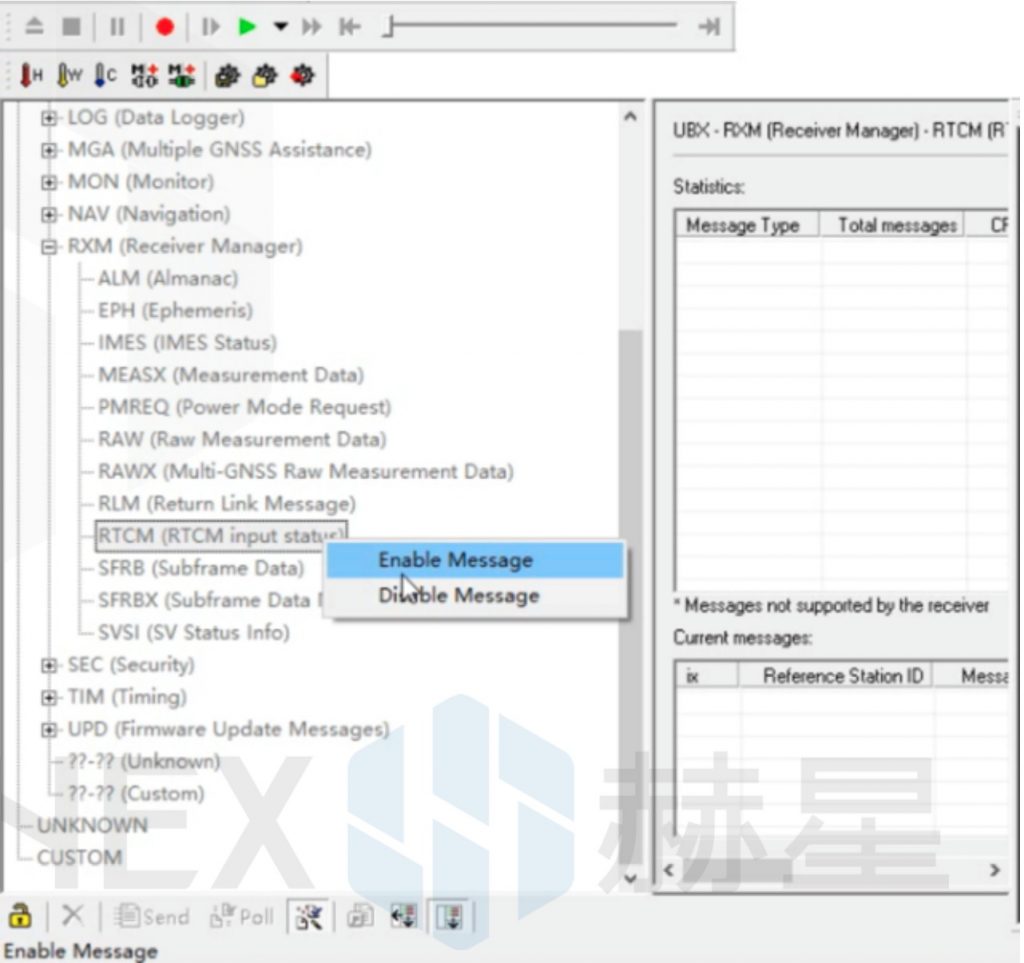
Ardından, “Görünüm → mesaj görünümü → UBX → RXM → RTCM(RTCM giriş durumu)” öğesini tıklayın, “mesajı etkinleştir” için sağ tıklayın.
Son olarak, arayüzün sol üst köşesindeki (aşağıda gösterilen) kırmızı kayıt simgesine tıklayın, kaydı kaydetmek için bir adres seçin, Tamam’a tıklayın, kayıt başlayacaktır. Kayıt durdurulduğunda, kayıt daha önce kaydedilen adreste görünecektir.

Kaydedilen verileri oynatmak için yeşil oynatma simgesine tıklayın, bir oynatma hızı seçin, saklanan veri dosyanızın belirtilen adresini seçin, ardından veriler oynatılacaktır.

Hata Ayıklama/Gelişmiş Yapılandırma için U-Centre’ı kullanın
Baz İstasyonunun Durumunu Kontrol Edin
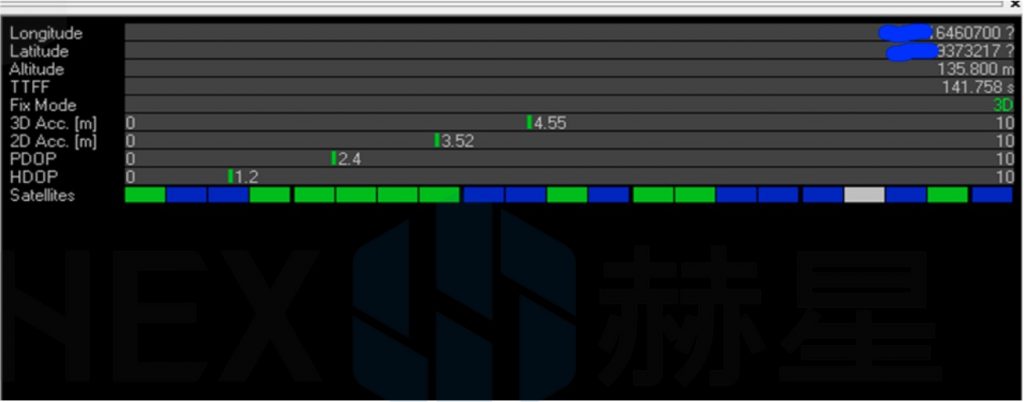
Ana modülü U-center yazılımına bağlayın, arayüzün sağ üst köşesindeki ekran kutusunu işaretleyin, Düzeltme Modu bölümü TIME olarak görüntülenir. Sabitleme Modu ZAMAN girmezse, baz istasyonunun mevcut durumu gezici modülünün RTK moduna girmesine izin vermek için yeterli değildir. Aşağıdaki şekilde gösterildiği gibi, Fix Mode 3D modunda görüntülenir, dolayısıyla RTK standardına henüz ulaşılamamıştır.
Baz istasyonunun ZAMAN Moduna girmemesinin olası nedeni:
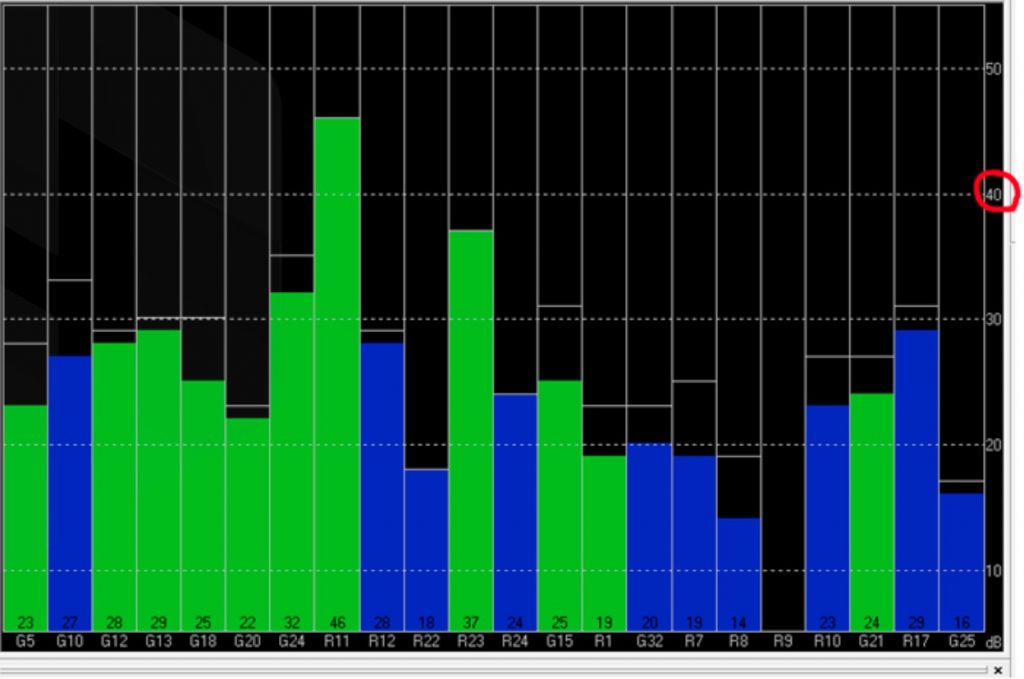
1) Baz istasyonu tarafından alınan sinyaller yeterince güçlü değil. Baz istasyonu tarafından alınan uydu gücünü kontrol etmek için yazılım arayüzünün sağ alt köşesine bakın. Kutudaki dikey çubuklar, geçerli baz istasyonu tarafından alınan uyduların gücünü gösterir. Dikey çubuk bir uyduyu temsil eder (uydu sistemlerinin seçimine bağlı olarak GPS veya Beidou / GLONASS).
Baz istasyonunun ZAMAN Modu şunları gerektirir: a) 5 GPS uydusu + 2 GLONASS uydusu, gücü > 40; b) Gücü > 40 olan 5 GPS uydusu + 3 Beidou uydusu;
Aşağıdaki şekilde gösterildiği gibi, yalnızca bir uydu gücü 40’tan fazladır. Bu nedenle, sinyal koşulu RTK standardını karşılamamaktadır.
2) Araştırma doğruluğu gereksiniminin kullanıcı girişi, elde etmek için çok katı veya baz istasyonu ölçme sürecini henüz tamamlamadı. Anket kurulumu için U-center’ı kullanarak, lütfen bu bölümün sonraki bölümüne bakın.
Rover’ın temel düzeltme verilerini alıp almadığını kontrol edin (Zaman aşımı)
Baz istasyonu ZAMAN Moduna girdikten sonra, gezicinin RTK modlarına girmesi için RTCM verilerini geziciye iletmek gerekir. Bu nedenle, iyi RTK konumlandırma performansı için gezici ve baz istasyonu arasında gerçek zamanlı ve verimli bir iletişim gereklidir.
Mobil istasyon ve baz istasyonu arasındaki veri iletiminde bir gecikme olup olmadığını kontrol edin, gezici modülü U-center’a bağlayın (veya önceki bir işlemi incelemek için veri günlüğünü tekrar oynatın). Age of DGNSS Corr parametrelerini görmek için “Görünüm→Mesaj görünümü→NMEA→GxGGA” dizinine gidin. Bu parametre gezicinin baz istasyonu verilerini almadığı zamanı temsil eder. Varsayılan baz istasyonu mesaj frekansı 1HZ olması durumunda, bu parametre 1 saniyeyi aşarsa, veri iletiminde belirli bir gecikme olur.
Baz İstasyonu için İnceleme/Sabit Modu Ayarla
Mission Planner RTK Inject sayfasına benzer şekilde, U-center, baz istasyonu anketi zamanını ve doğruluğunu ayarlamak için de kullanılabilir. “Görünüm → Mesaj görünümü → UBX → CGF → TMODE3” girin. Mod açılır seçeneği altında 1.Survey-in’i seçin ve anket süresini (ve baz istasyonunun anket yapması için gereken minimum süreyi) ayarlayın. Anketin mevcut durumu “Görünüm→Mesaj Görünümü→NAV→SVIN” sayfasında görüntülenebilir.
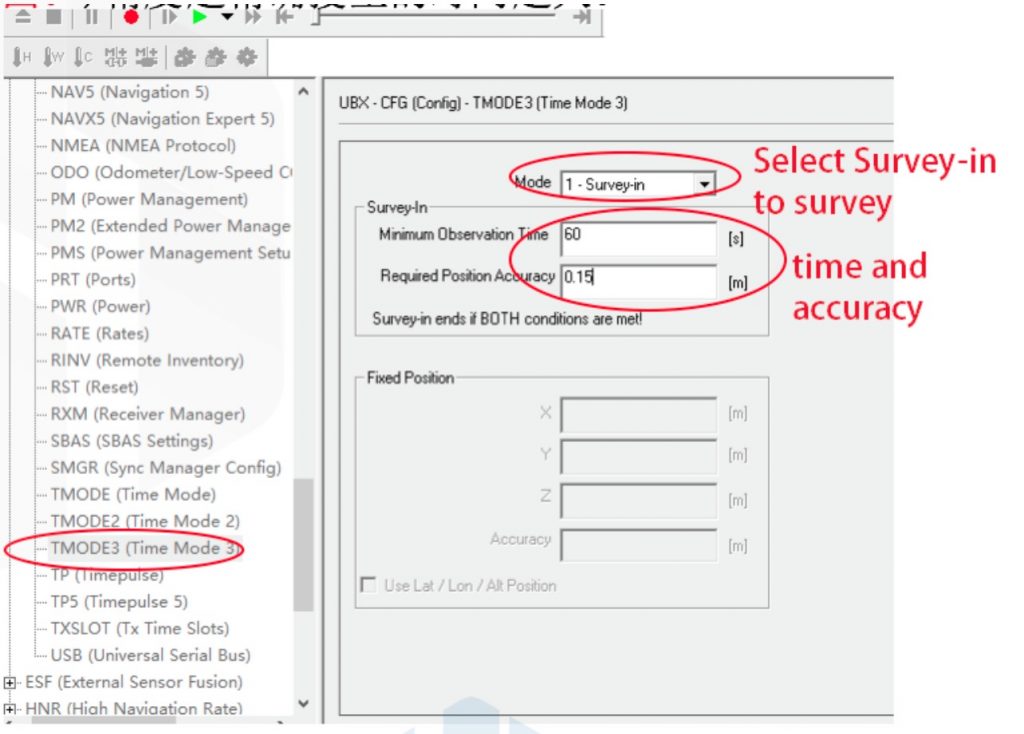
Baz istasyonu ayrıca Sabit Mod’a da ayarlanabilir. Baz istasyonunun mevcut kesin coğrafi koordinatları bilindiğinde, koordinatlar doğrudan baz istasyonuna girilebilir, bu da ölçüm için gereken zamandan tasarruf sağlar. TMODE3 sayfasında, açılır listeden Sabit mod’u seçin ve ardından kesin olarak bilinen baz istasyonu koordinatlarını girin.
Anket veya sabit modu ayarladıktan sonra, değiştirilen verileri baz istasyonuna aktarmak için sayfanın sol alt kısmındaki Gönder düğmesine tıklayın.
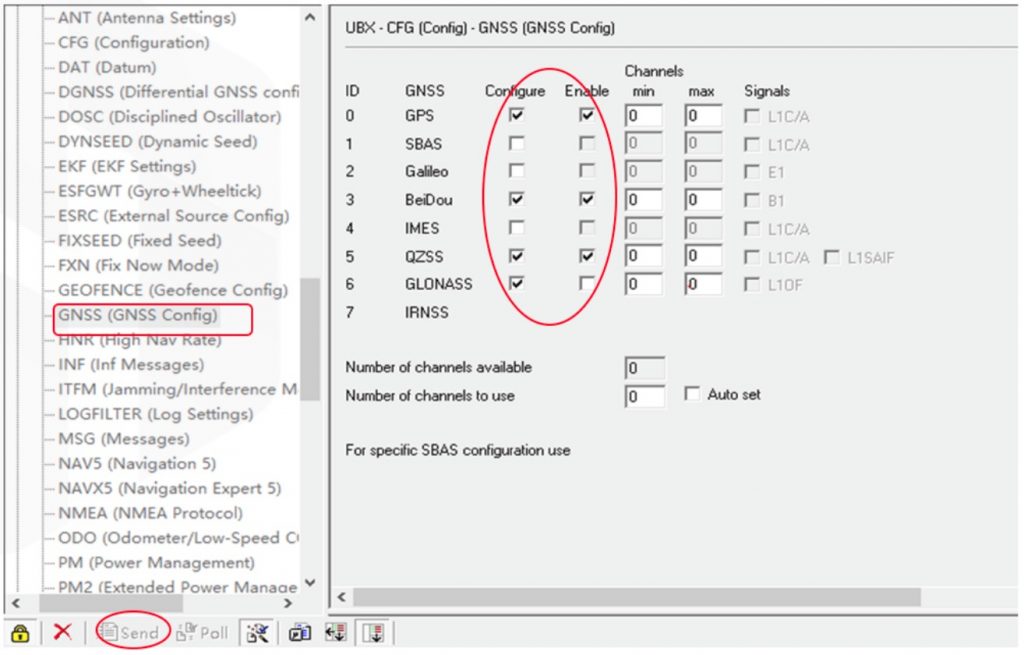
Beidou/GLonass Kullanımı
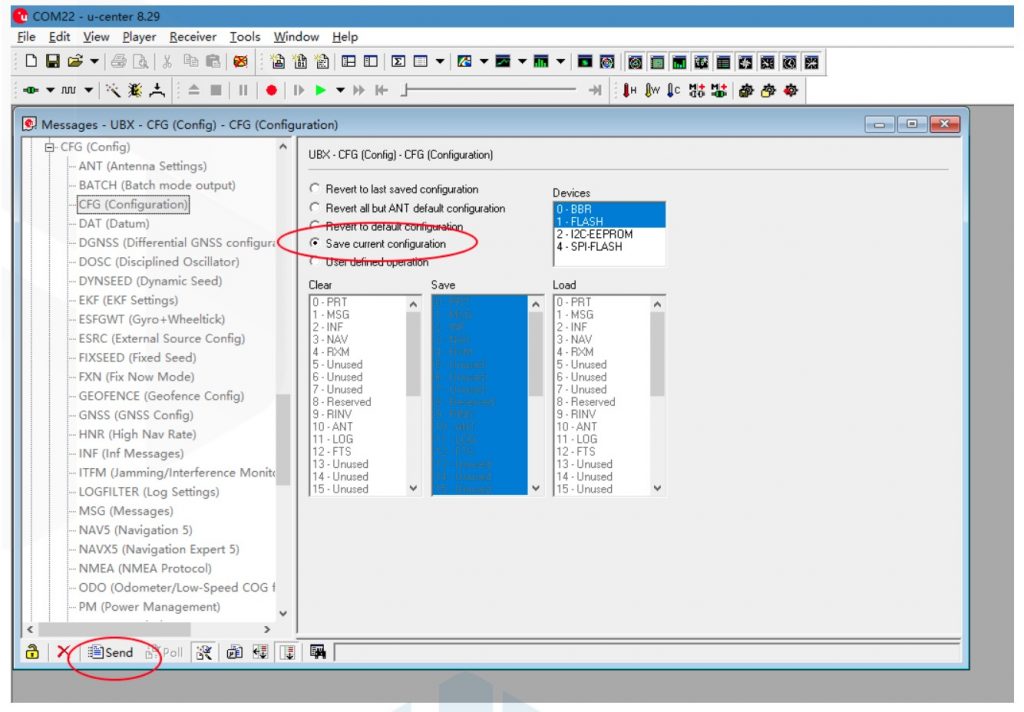
uBlox 1.30 üretici yazılımı, varsayılan olarak konum hizmetleri için GPS + GLONASS navigasyon sistemini kullanır. GPS + Beidou navigasyon sistemine geçmek istiyorsanız “Görünüm→Mesaj görünümü→UBX→CGF→GNSS dizinine girip GLONASS Enable seçeneğindeki işareti iptal edip Beidou Enable seçeneğini işaretlemeniz gerekmektedir. Seçimden sonra tıklayınız. Değişikliği tamamlamak için “Gönder”.
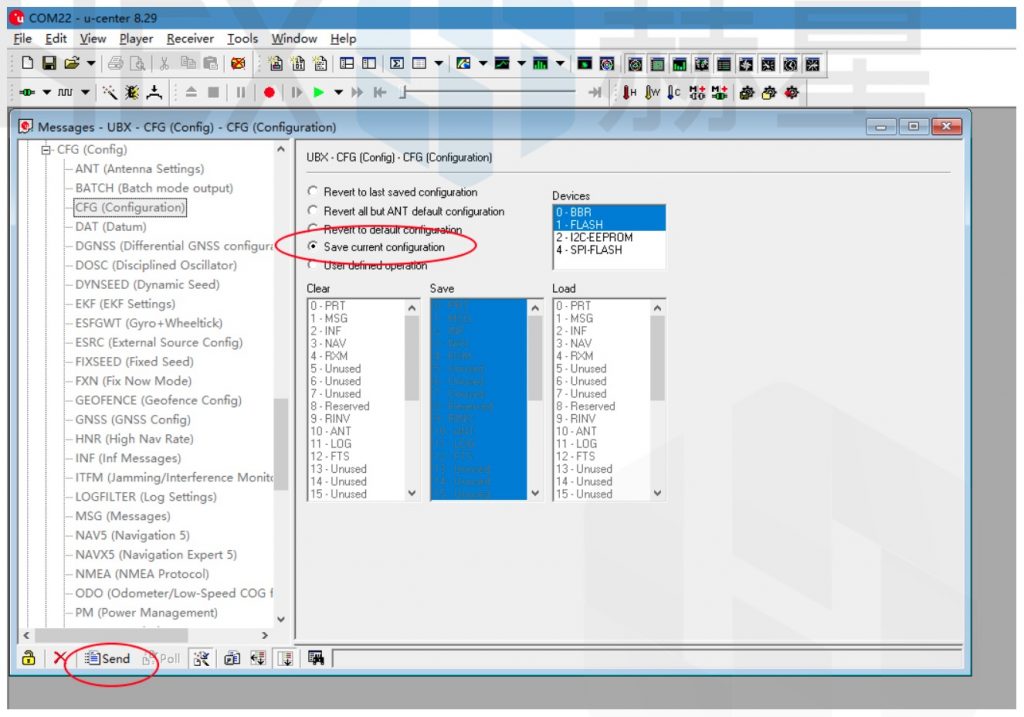
Mevcut ayarları kaydetmek için, “Görünüm→Mesaj görünümü→UBX→CFG (Yapılandırma)” sayfasına gidin ve Geçerli yapılandırmayı kaydet seçeneğine ve ardından Gönder’e (aşağıda gösterildiği gibi) tıklayın.
Not: Baz istasyonu ve gezici aynı navigasyon sistemi konfigürasyonunu kullanmalıdır, aksi takdirde gezici RTK modlarına giremez.
Temel Modül G/Ç Bağlantı Noktası ve Protokol Kurulumu
u-blox M8P yongası, USB, UART, I2C vb. dahil olmak üzere çeşitli giriş ve çıkış protokollerini destekler. HERE + baz istasyonu modülü, veri iletişimi ve RTK çıkışları için USB bağlantı noktasını kullanır. Mevcut ayarları onaylamanız gerekiyorsa, “Görünüm → Mesaj görünümü → UBX → CGF → PRT” seçeneğine gidin ve Hedef alanında 3-USB’yi seçin. Doğru giriş ve çıkış protokolleri aşağıda gösterilmiştir:
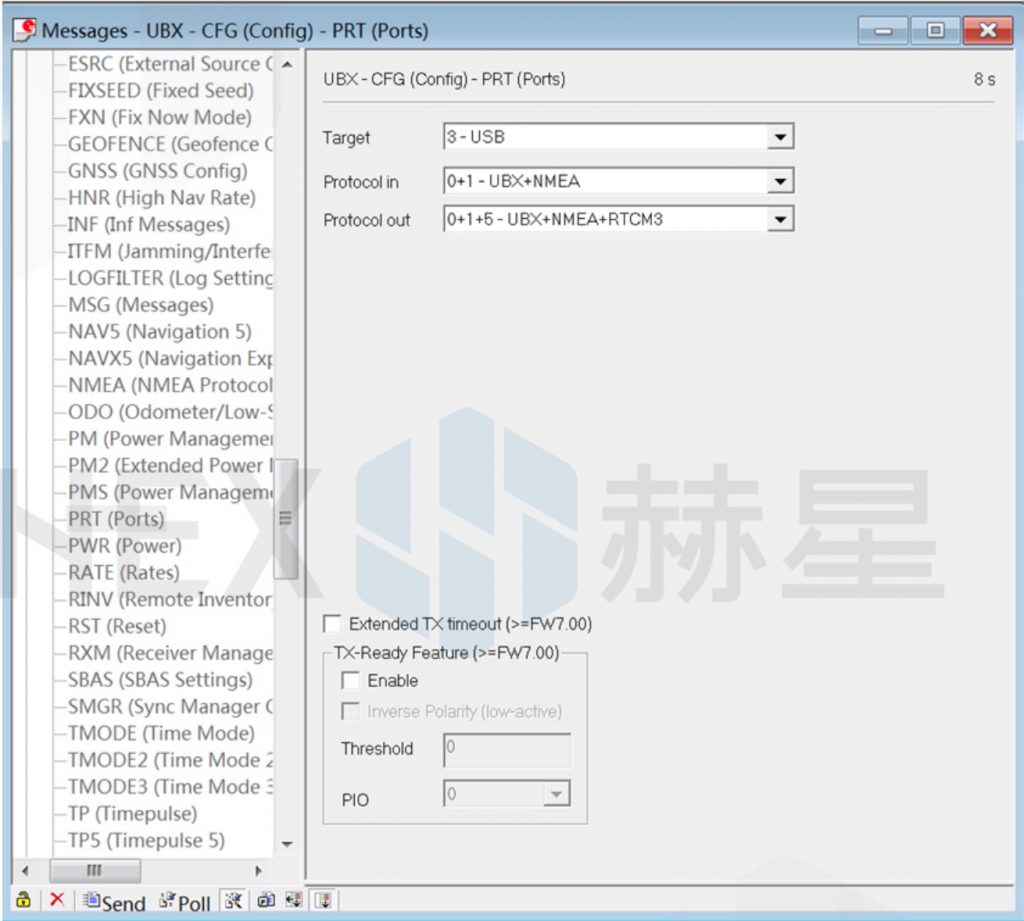
Daha fazla çıktı protokolü (UART gibi) kullanmak istiyorsanız, bu sayfada çıktı protokolünü ve belirli bir mesaj kombinasyonunu da seçebilirsiniz. Çeşitli protokoller altında çıkış için belirli bir mesaj dizisi ayarlamak istiyorsanız, “Görünüm → Mesajlar görünümü → UBX → CGF → MSG” seçeneğine gidebilirsiniz. Ardından belirli bir mesaj seçin ve ardından istediğiniz protokol türünü kontrol edin.
To saveMevcut ayarları kaydetmek için, “Görünüm→Mesaj görünümü→UBX→CFG (Yapılandırma)” seçeneğine gidin ve mevcut yapılandırmayı “Kaydet” seçeneğine tıklayın, ardından Gönder’e tıklayın.
Rover Modülü Çıkış Hızını Değiştirin
Varsayılan olarak, gezici modülün konum bilgisinin çıkış frekansı 1HZ’dir. Konum çıkış frekansını hızlandırmanız gerekiyorsa, “Görünüm → Mesaj görünümü → UBX → CGF → RATE” girebilir ve “Ölçüm Periyodu”nu değiştirebilirsiniz. Örneğin, “Ölçüm Periyodu”nu 200ms’ye ayarlayın, ardından “Ölçüm Frekansı” 5Hz’e yükseltilecektir.
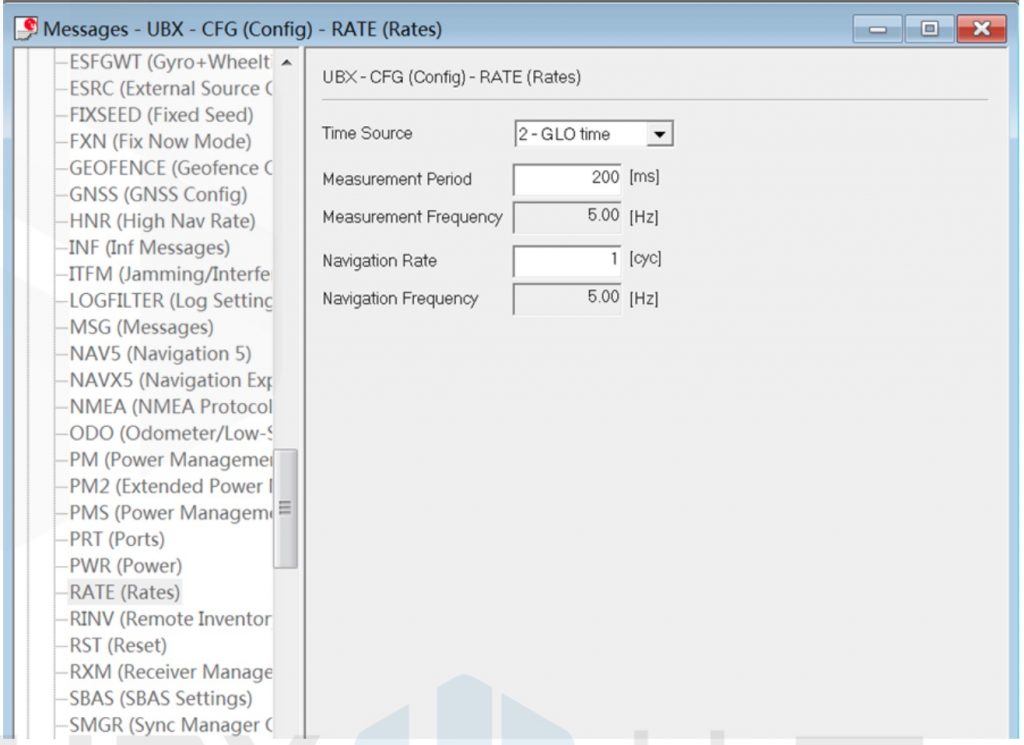
Geçerli ayarları kaydetmek için, “Görünüm→Mesaj görünümü→UBX→CFG (Yapılandırma”ya gidin ve Geçerli yapılandırmayı kaydet seçeneğini ve ardından Gönder’i tıklayın.