Modları ve Mavlink Düğmelerini Yapılandırın
Herelink, altı programlanabilir düğme ve bir donanım tekerleği ile donatılmıştır; bunlar, mod seçimi, servo çıkışlar ve uygulama kontrolü gibi mavlink komutlarını önceden ayarlamak için Solex TX veya QGC’de yapılandırılabilir.
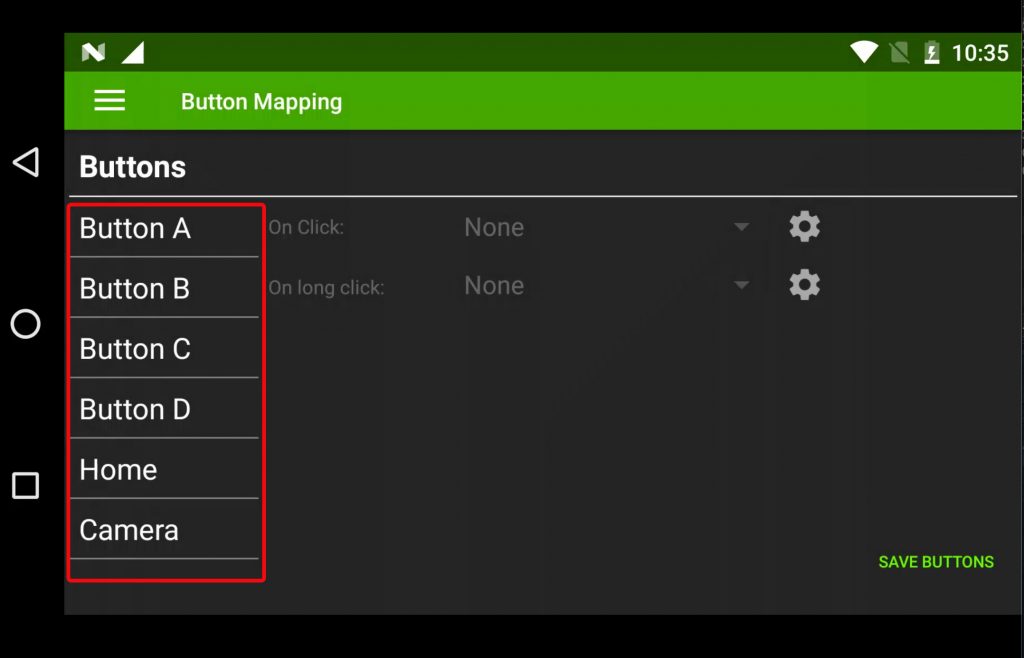
A,B,C,D,Cam, Home ve HW Wheel düğmeleri Solex TX ve QGC’den Mavlink’e komutlarda yapılandırılabilir, bunlar şunları içerir:
- Mod seçimi
- Kurma/Devre Dışı Bırakma
- Servo Çıkış Kontrolü
- Röle Kontrolü
- HW Tekerlek Kanal Haritalama
- Uygulamaya Özel Komutlar
Otopilot Modu Seçimi
Solet TX ve QGC, Ardupilot ve PX4’te mod seçimi için ekran kontrollerine sahiptir, yani: loiter, stabilize gibi uçuş modlarını seçme ve değiştirme. Modları değiştirmek için bir veya daha fazla düğmeyi yapılandırmak istiyorsanız, bunlar yalnızca Solex TX veya QGC içinde Mavlink düğme komutlarına ayarlanmalıdır.
Mavlink, mod değişikliği için güvenli bir komut bağlantısı sağlar ve sistemin yeniden başlatılmasından ve sinyal kaybından etkilenmez.
Mod seçimini yapılandırdıktan sonra, kullanıcılar, sistemi kullanmadan önce test ederek arıza güvenlikli ayarlarının doğru olduğunu ve beklendiği gibi çalıştığını doğrulamalıdır.
Önemli Not: Ardupilot, Sbus kanal 5’i varsayılan olarak mod seçimine ayarlar, FLTMODE_CH: 0’a ayarlanarak buradaki bağlantı ile devre dışı bırakılmalıdır.
EV TUŞU
Ev düğmesi yalnızca Solex TX veya QGC’de mavlink komutlarıyla yapılandırılabilir. Ev Düğmesine Uzun Basmanın ‘RTL’ (Eve Geri Dön) komutuna ayarlanması önerilir.
Düğme Yapılandırması
Solex TX’de Yapılandırmak İçin
- Solex TX Uygulamasını Açın
- Sol üst köşedeki 3 satıra tıklayın
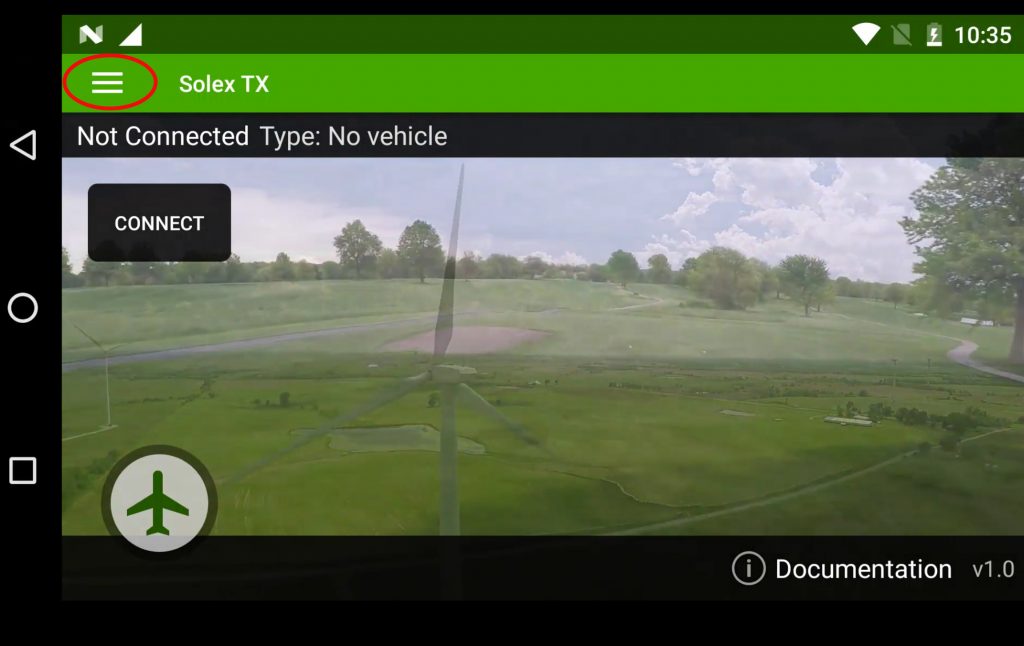
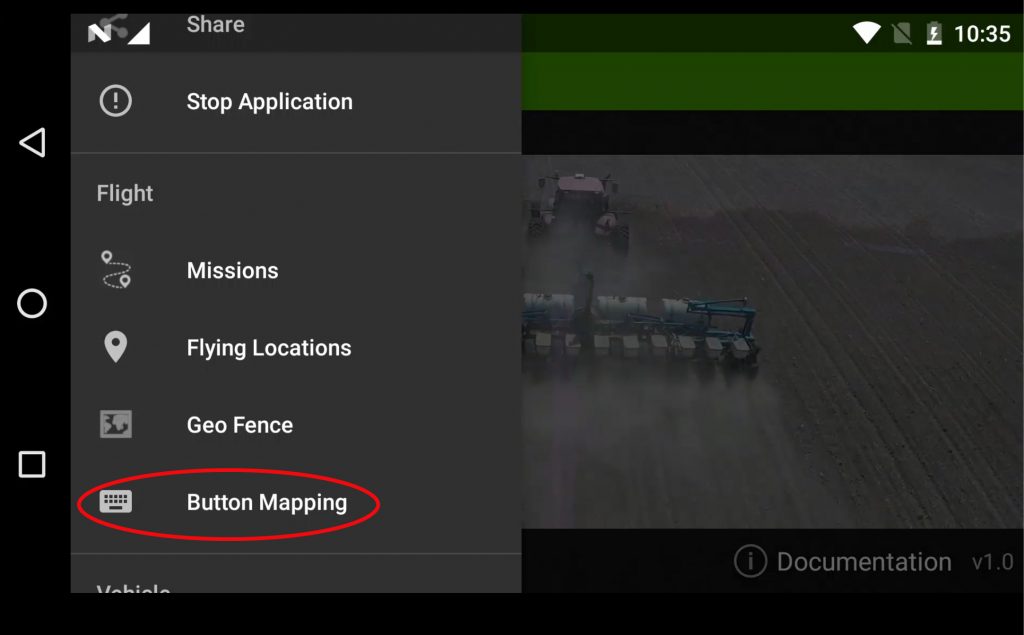
- ‘Düğme Eşleme’yi seçin
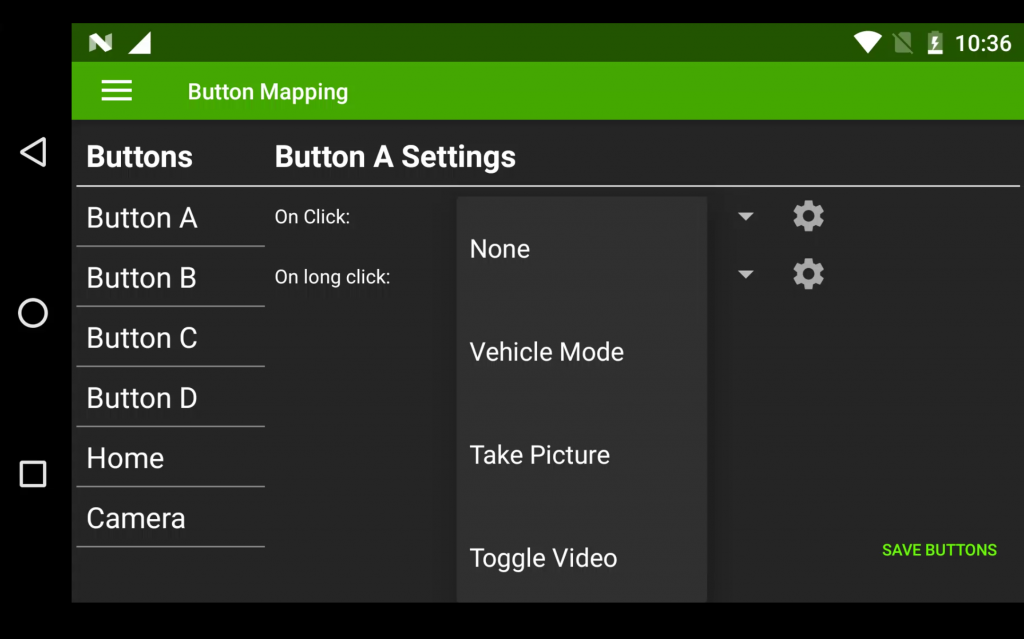
- İstediğiniz düğmeyi seçin
- ‘Tıkla’ veya ‘Uzun Tıklama’yı seçin (Bunun, her bir düğmeye iki işlev ayarlamanıza izin verdiğini unutmayın)
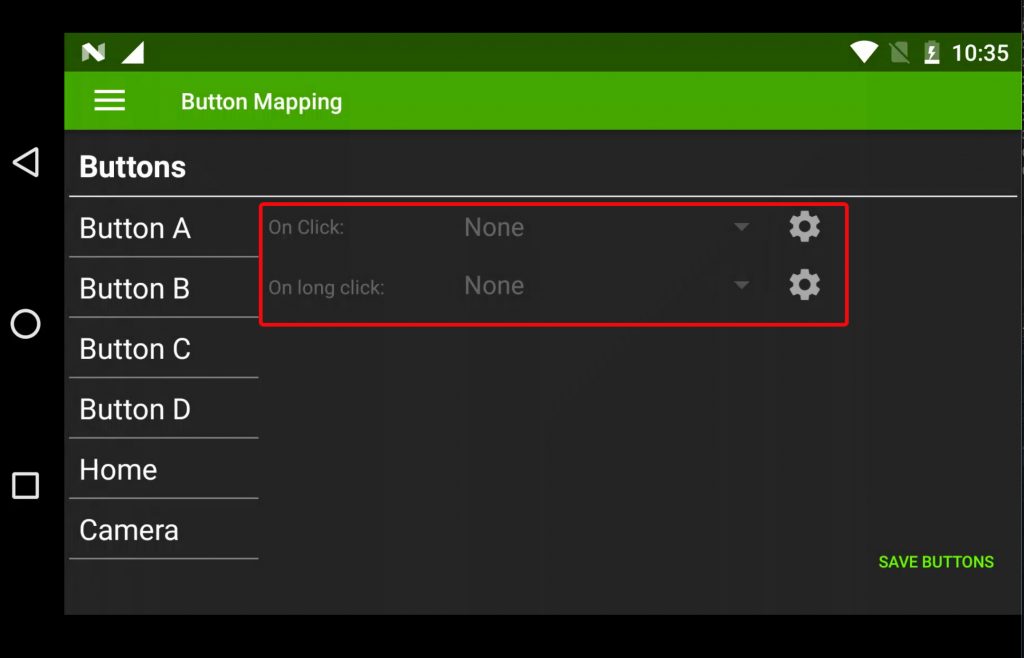
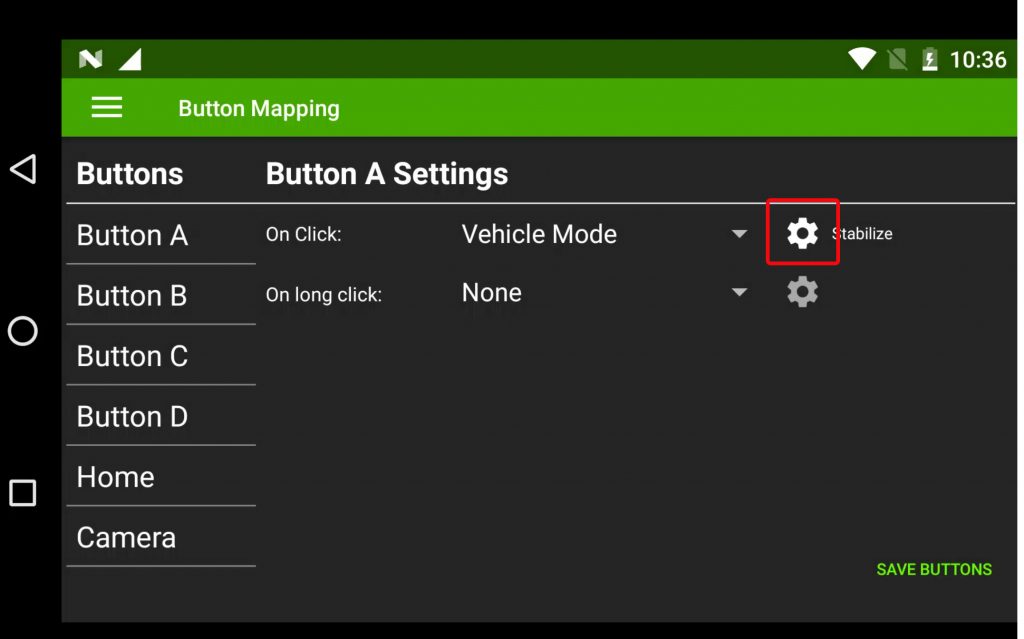
- İstediğiniz işlevi seçmek için açılır listeye tıklayın
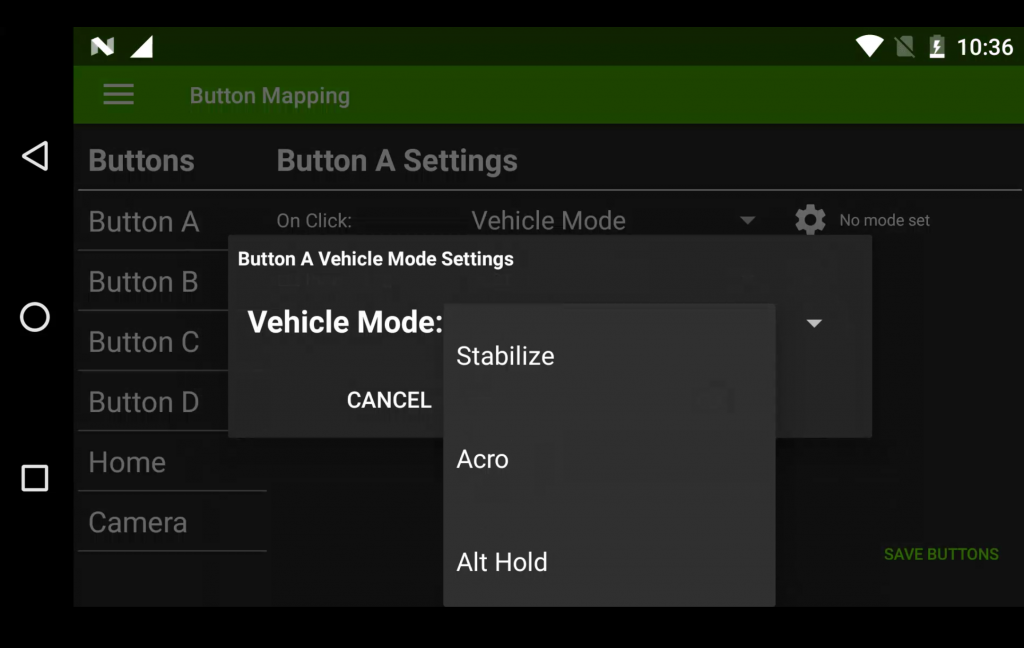
- Seçili işlev içindeki seçeneği seçmek için küçük dişliye tıklayın
- İşlev seçeneğini seçin
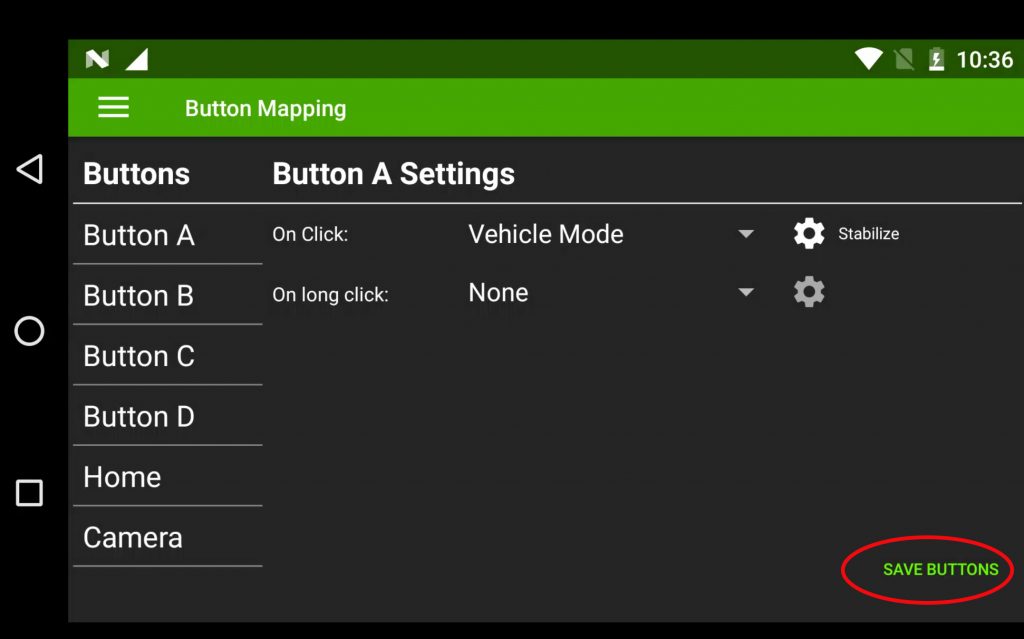
- Her düğme ataması için tekrarlayın ve bitirmek için alt köşedeki ‘Düğmeleri Kaydet’i tıklayın
QGC’de Yapılandırmak için
- QGC uygulamasını açın
- Sol üst köşedeki 3 çarka tıklayın
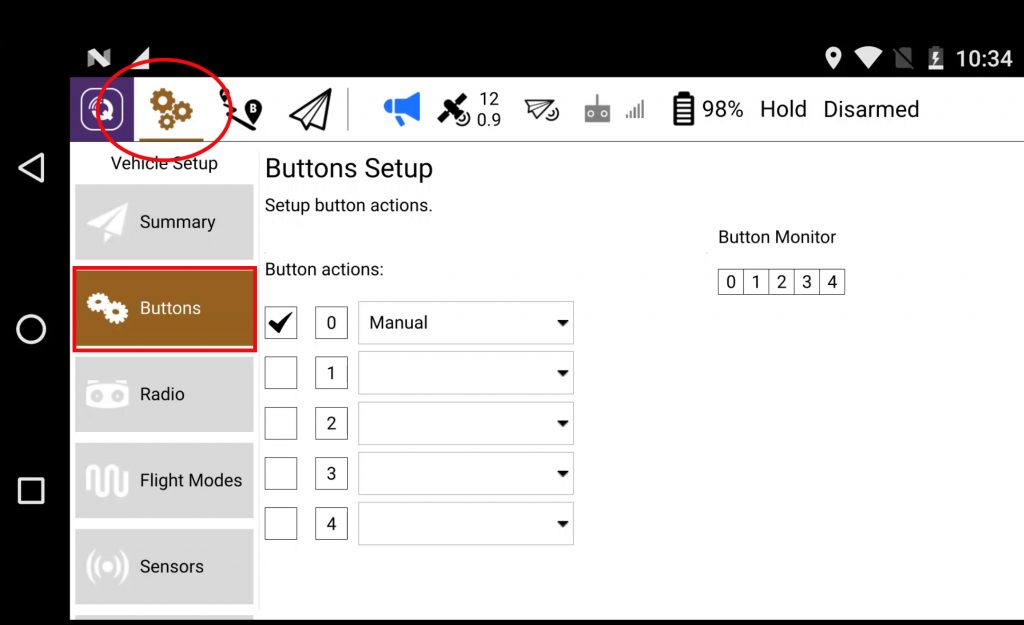
- ‘Düğmeler’i seçin
- İstediğiniz düğmenin yanındaki kutuyu işaretleyin
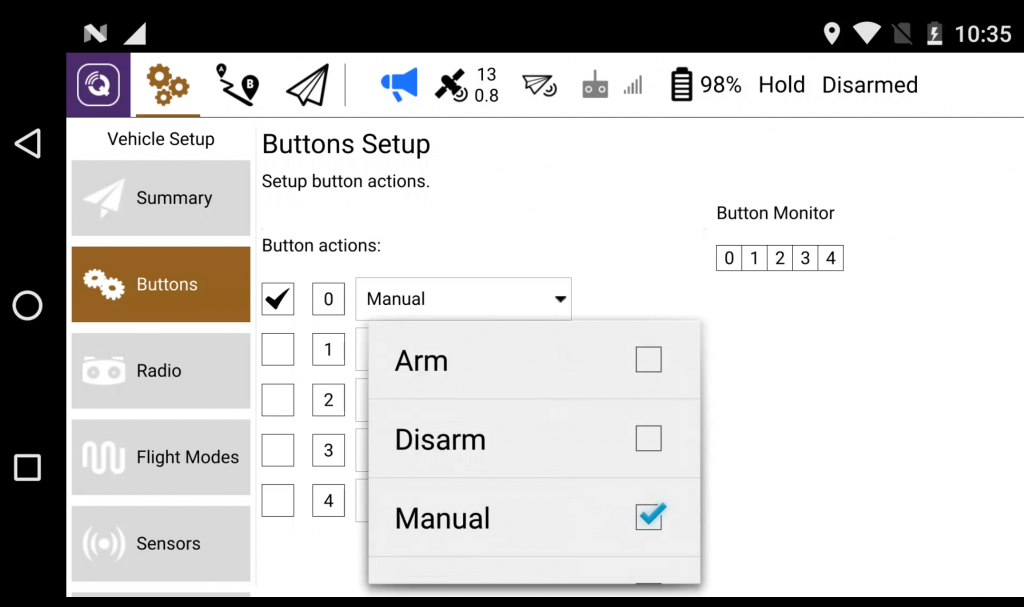
- İşlevi seçmek için açılır listeye tıklayın
- Her düğme için tekrarlayın
Donanım Tekerleği
Donanım tekerleği varsayılan olarak SBUS kanal 5’e eşlenmiştir ancak aynı zamanda Solex TX’te Cube Autopilot’ta Servo çıkış kanalları 1-16’ya yapılandırılabilir, ayrıca Solex TX’de bir düğme aracılığıyla servo çıkışını değiştirebilirsiniz.
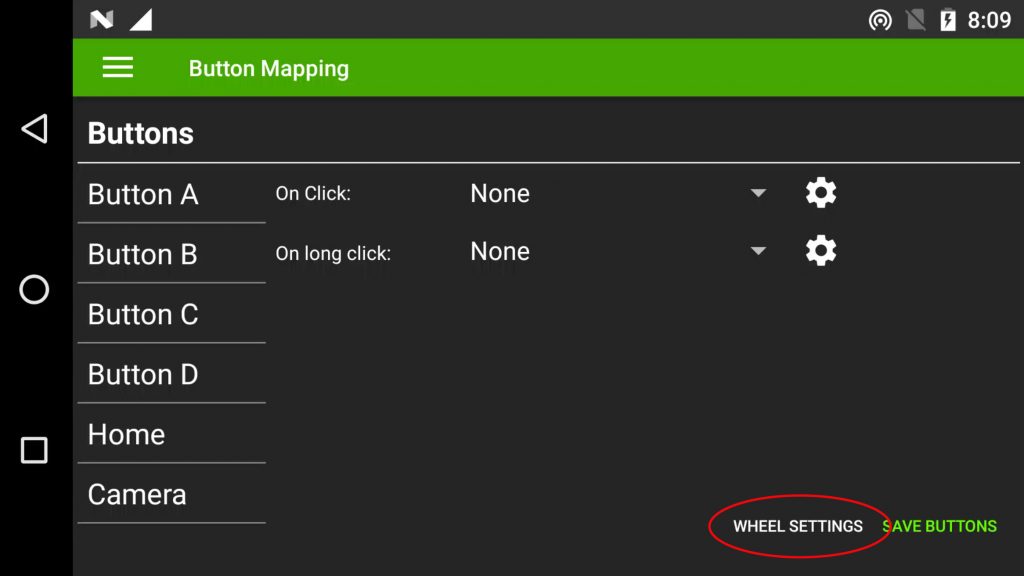
Solex TX’te Tekerleği Yapılandırmak İçin
- Solaex TX uygulamasını açın.
- Sol üst köşedeki 3 satıra tıklayın
- Yukarıdaki gibi ‘Düğme Eşleme’yi seçin
- Alt köşedeki ‘Tekerlek Ayarları’nı tıklayın
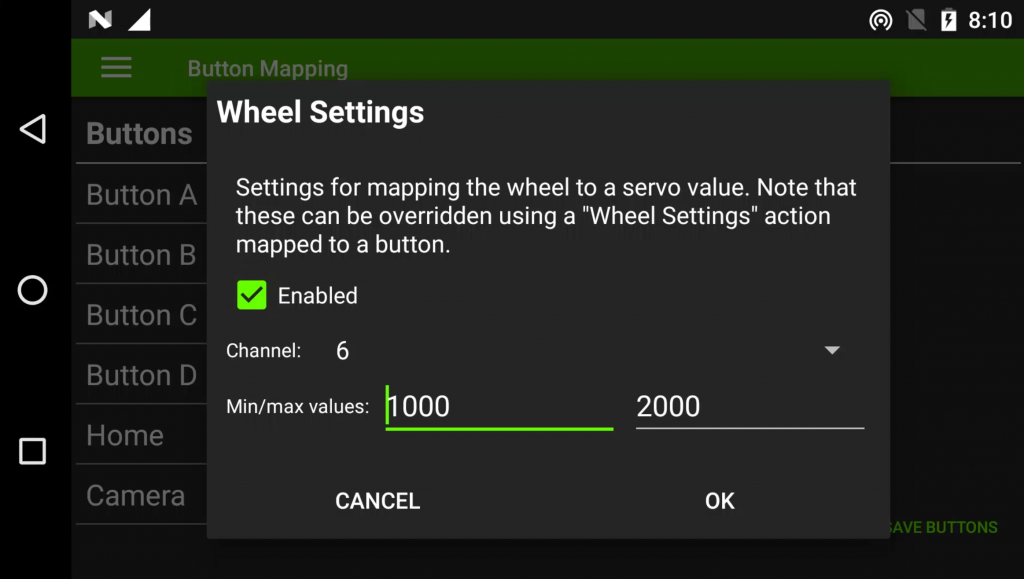
- 1- ile 16 arasında istediğiniz servo kanalını seçin
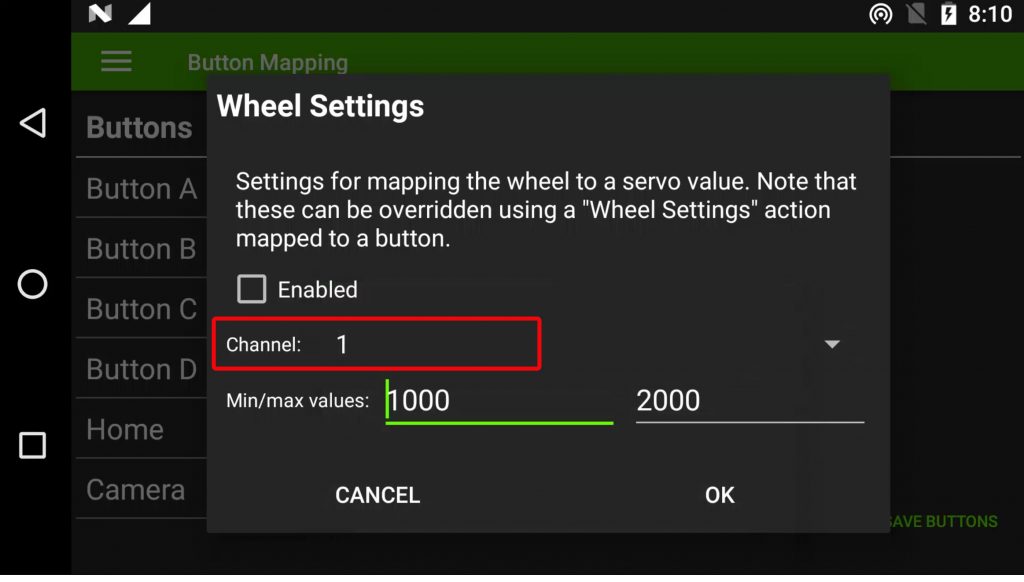
- Uygulamanız için PWM çıkış aralığını seçin
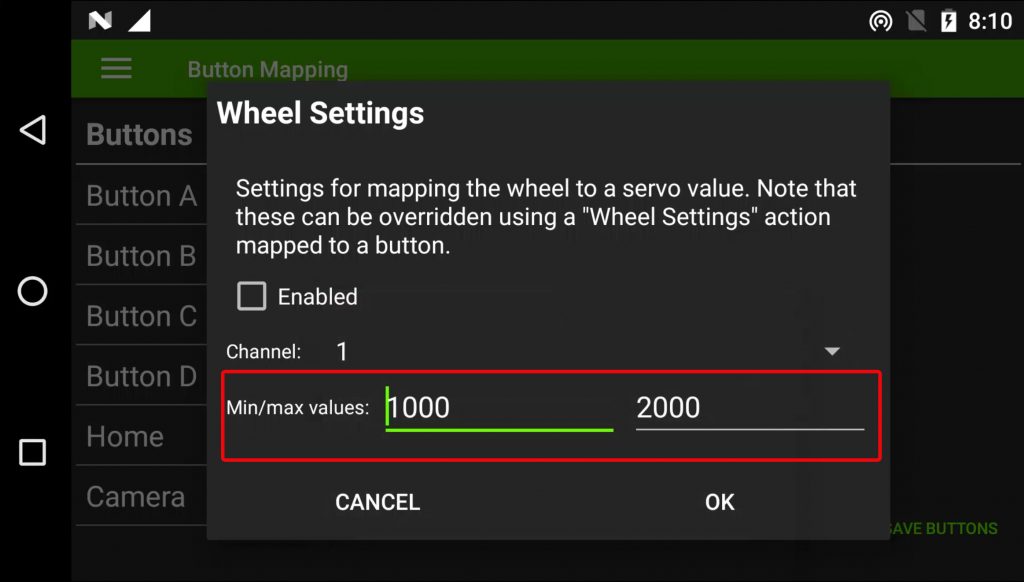
- Çıktıyı etkinleştirmek için ‘Etkin’ kutusunu tıklayın
- Tamam’ı tıklayarak bitirin ve alt köşedeki ‘Düğmeleri Kaydet’i tıklayın
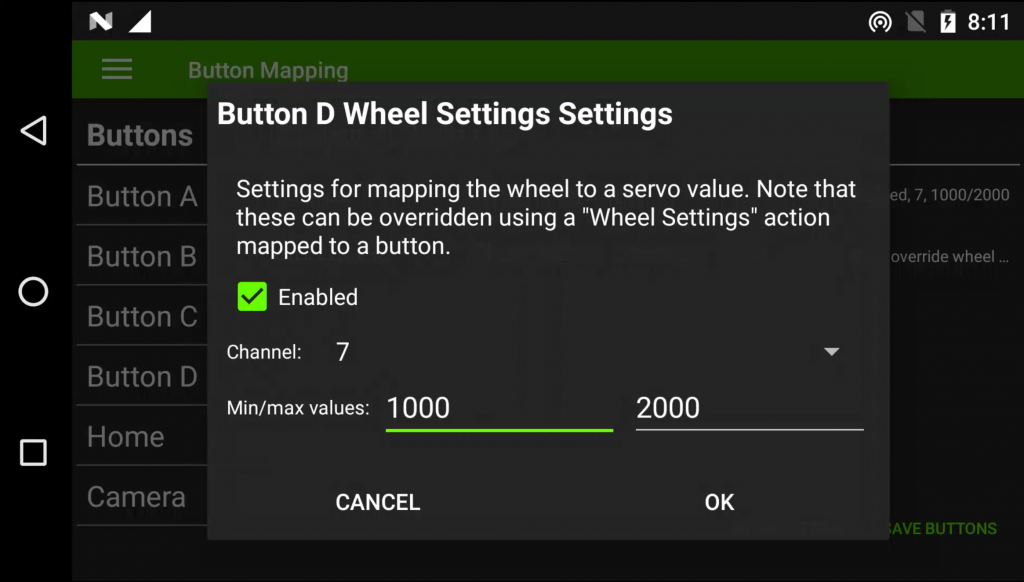
- Tekerlek servo çıkışını değiştirmek üzere bir düğmeyi yapılandırmak için düğmeyi ‘Tekerlek Ayarları’ olarak yapılandırın
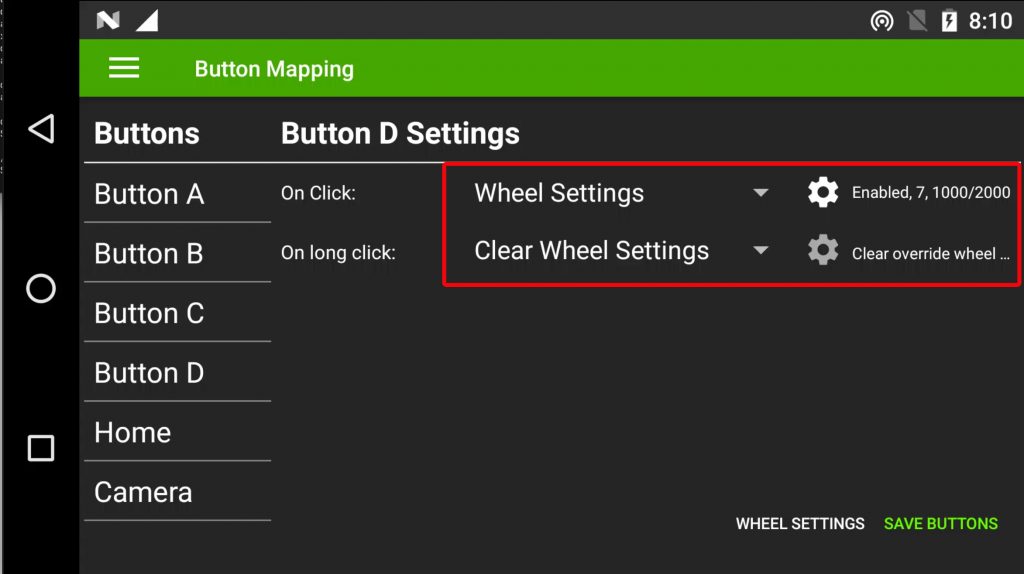
- Dişliye tıklayın ve yeni kanal ve PWM değerlerini ayarlayın ve Tamam’a ve ardından alt köşedeki ‘Düğmeleri Kaydet’e tıklayın.
Bir kez değiştirildiğinde, tekerlek yeni seçilen kanalda çıkış verecektir, orijinal servo çıkışına geri dönmek için yukarıda gösterildiği gibi bir düğme işlevini ‘Terk Ayarlarını Temizle’ olarak programlamanız gerekecektir.