HerePro
HerePro Kılavuz

HerePro Yüksek Hassasiyetli Çok Bantlı RTK Navigasyonu
Genel Bakış
HerePro, profesyonel bir Yüksek Hassasiyetli Çok bantlı RTK Navigasyon modülüdür. BeiDou, Galileo, GLONASS, GPS, QZSS gibi çeşitli GNSS seçeneklerini destekler. Sırasıyla baz ve gezici olarak 2 HerePro modülünü bağlamak, hassas bir Çok Bantlı Çok Bantlı RTK sistemini tamamlayabilir. HerePro gezici ve taban, hem yazılım hem de donanım olarak aynıdır. Parametre ayarı tek ayrımdır.
HerePro, saniyeler içinde bir RTK Fix üzerinde yakınlaşmak ve daha güvenilir santimetre seviyesinde konumlandırma sağlamak için gelişmiş algoritmalara sahip çok frekanslı DGNSS sinyallerini kullanır.
Özellikleri
- Profesyonel bir yüksek hassasiyetli Çok bantlı RTK navigasyon modülü olan u-blox F9P ile donatılmıştır.
- Yerleşik STM32H753 çipi tarafından sağlanan güçlü işleme performansı. Gerçek zamanlı işleme ve veri optimizasyonu ve İnsansız Endüstri standardı AP_Periph Firmware sunar. CAN veya USB aygıt yazılımı güncellemelerini destekler.
- Taoglass’ın kişiye özel çok bantlı anteni L1, L2 ve E5 frekanslarını destekler. Yüksek kazanç, yüksek hassasiyet ve yüksek stabiliteye sahiptir.
- HerePro tabanı, performansı en üst düzeye çıkarmak için farklı senaryolar için seçilebilen hem sabit hem de hareketli taban modunu destekler.
- HerePro bir baz ve gezici 2’si 1 arada İşlevsellik geçişi, parametre ayarlarıyla kolayca yapılabilir.
- HerePro, bir RTK Fix’e hızlı yakınsamaya izin veren gelişmiş algoritmaya sahip çok frekanslı DGNSS sinyallerini kullanarak daha güvenilir ve kararlı santimetre düzeyinde konumlandırma sağlar.
- HerePro modülü 15 x 78mm ve 101gr’dır.
- 6 – 40V çift ve geniş aralıklı giriş. Farklı voltaj seviyeleriyle uyumludur. Gelişmiş güvenlik için yedek güç girişi.
- ProfilLED’lerle gömülü dairesel LED halkası. Bildirim veya navigasyon sinyalleri için yerleşik çoklu ekran modları. Görüntüleme modları, parametreler veya yerleşik Lua Komut Dosyası aracılığıyla belirli senaryolara göre seçilebilir.
- CAN FD, gerçek zamanlı ve yüksek aktarım hızı.
- Dahili 9 eksenli IMU. HerePro, gelecekteki donanım yazılımı güncellemeleri aracılığıyla, sıkı bir şekilde bağlanmış DGNSS-INS-füzyon çözümleri elde edebilir.
Teknik Özellikleri
| Özellik | Detay |
|---|---|
| Alıcı tipi | 184-channel u-blox F9P |
| GNSS sistemleri | BeiDou, Galileo, GLONASS, GPS, QZSS |
| Uydu bantları | BDS B1I B2I, GPS L1C/A L2C, GLONASS L1OF L2OF, GALILEO E1B/C E5b, QZSS L1C/A L2C |
| Maksimum GNSS sistemleri | 4 |
| Navigasyon güncelleme oranı | RTK için 20 Hz’e kadar |
| Yatay ve dikey doğruluk | RTK 0.01m +1ppm CEP |
| Yönelim doğruluğu | 0.4 derece |
| PVT yatay konumlandırma doğruluğu | 1.5m CEP |
| Maksimum irtifa | 50,000 m |
| Azami hız | 500 m/s |
| Yakınsama süresi | RTK < 10s |
| Kazanım | Soğuk başlangıç 24s Destekli başlangıç 2s Yeniden edinme 2s |
| Duyarlılık | İzleme ve Navigasyon: –167 dBm Soğuk başlatma: –148 dBm Sıcak başlatma: –157 dBm Yeniden edinme: –160 dBm |
| Anten | Çok bantlı çift anten |
| Zaman Atımı | 0.25hz ile 10mhz arasında yapılandırılabilir |
| Protokoller | NMEA、UBX binary、RTCM 3.3 |
| Anti-jamming | Aktif CW algılama ve kaldırma Yerleşik bant geçiren filtre |
| Anti-spoofing | Gelişmiş kimlik hatası önleme algoritmaları |
| Power (XT30) | x2 |
| CAN FD | x2 |
| USB / GPIO | x1 / x2 |
| Hafıza kartı | 16GB |
| Flash | 2M |
| RAM | 1M |
| Giriş gerilimi | 6 V – 40 V (maksimum 60 V) |
| Çalışma sıcaklığı | -40 °C ila +85 °C |
| Ebatlar | 15 x 78 mm |
| Ağırlık | 101gr(Kablo hariç) |
Kullanım kılavuzu
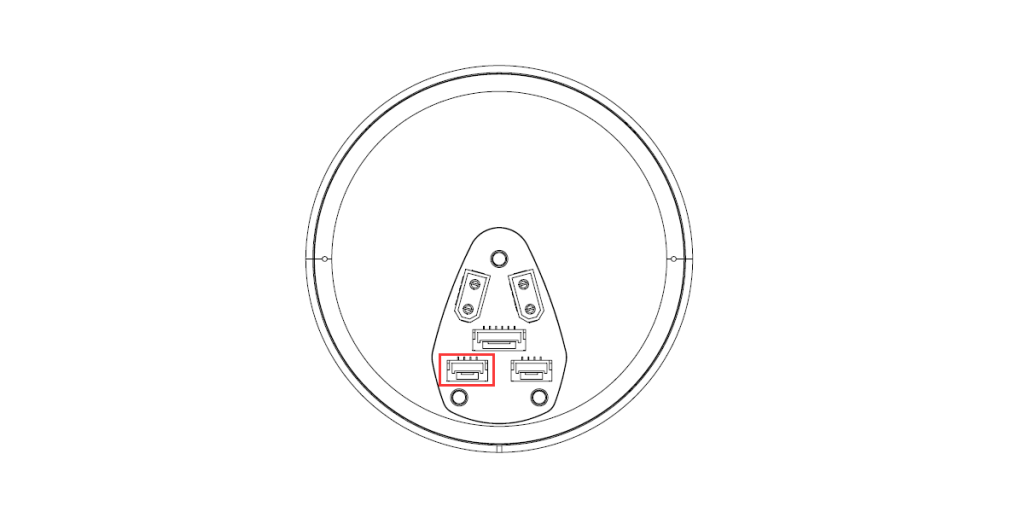
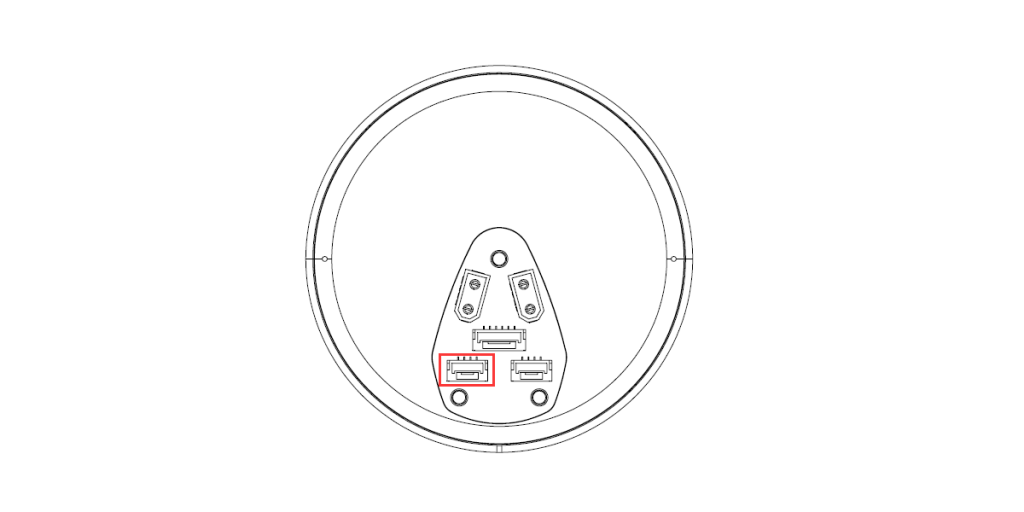
Konektörü kurulumu
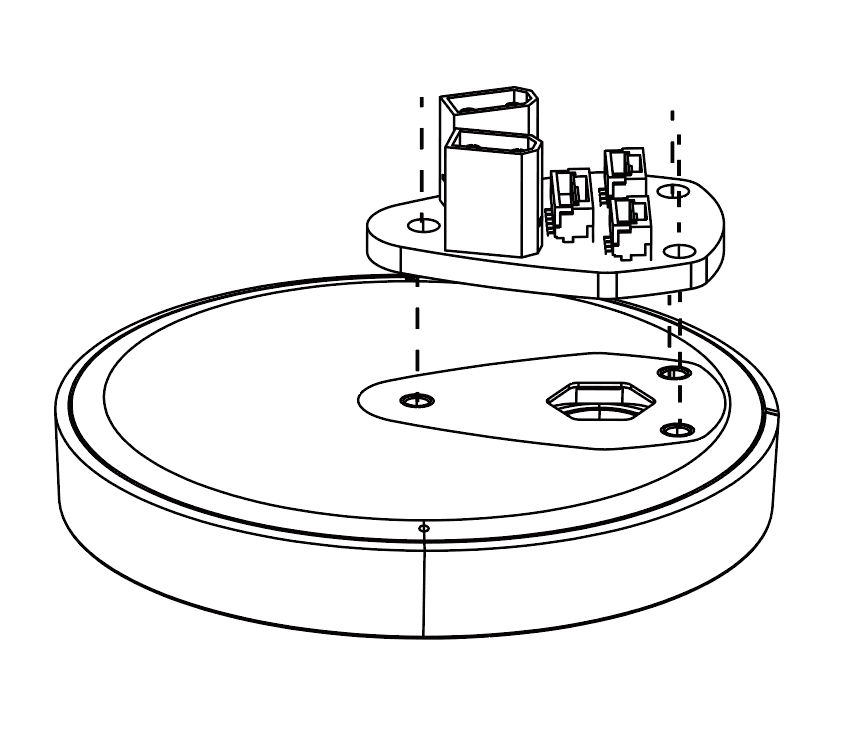
HerePro, bağlantı noktaları için stok konektörü ile birlikte gelmez. İlk kez kullanmadan önce bağlantı noktası konektörünü aşağıda gösterildiği gibi kurun:
Bağlantı noktası bağlantısı ve HerePro üzerindeki montaj deliklerini hizalayın. Ardından 3 M3*8 vidayla sıkıca kilitleyin.
Ardupilot ile kullanma:
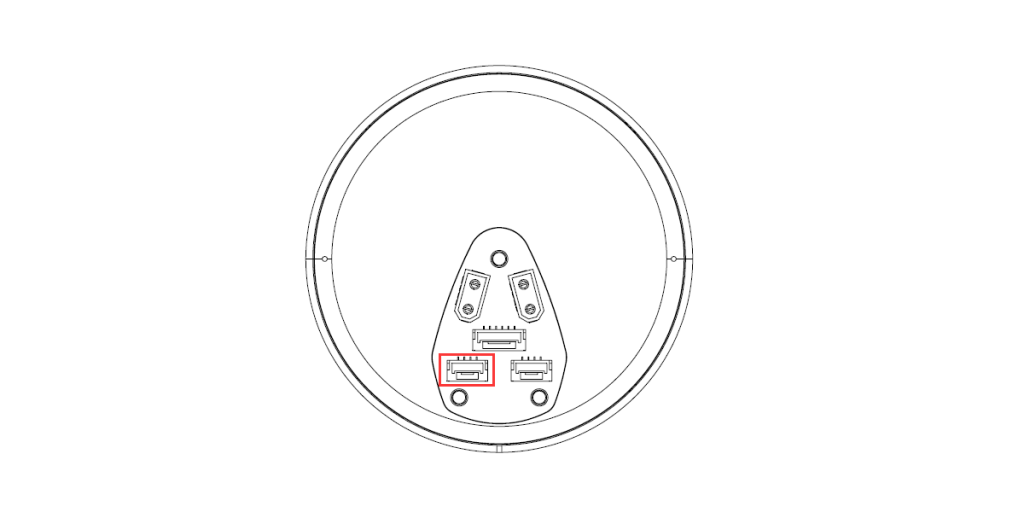
4pin CAN kablosunu HerePro’daki sol taraftaki CAN bağlantı noktasından otomatik pilotta CAN1 veya CAN2’ye bağlayın. Ardından HerePro’ya 6V – 40V sağlayın.
Otomatik pilotu açın ve Görev Planlayıcı’ya bağlayın. Yapılandırma – Tam Parametre Listesi sayfasına gidin ve aşağıdaki parametreleri değiştirin:
- CAN_D1_PROTOCOL: 1
- CAN_D2_PROTOCOL: 1
- CAN_P1_DRIVER: 1
- CAN_P2_DRIVER: 1
- GPS_TYPE: 9
- NTF_LED_TYPES: 231
Tamamlandığında, “Parametreleri Yaz” ı tıklayın. Otopilot yeniden başlatıldıktan sonra CAN işlevi etkinleştirilmelidir.
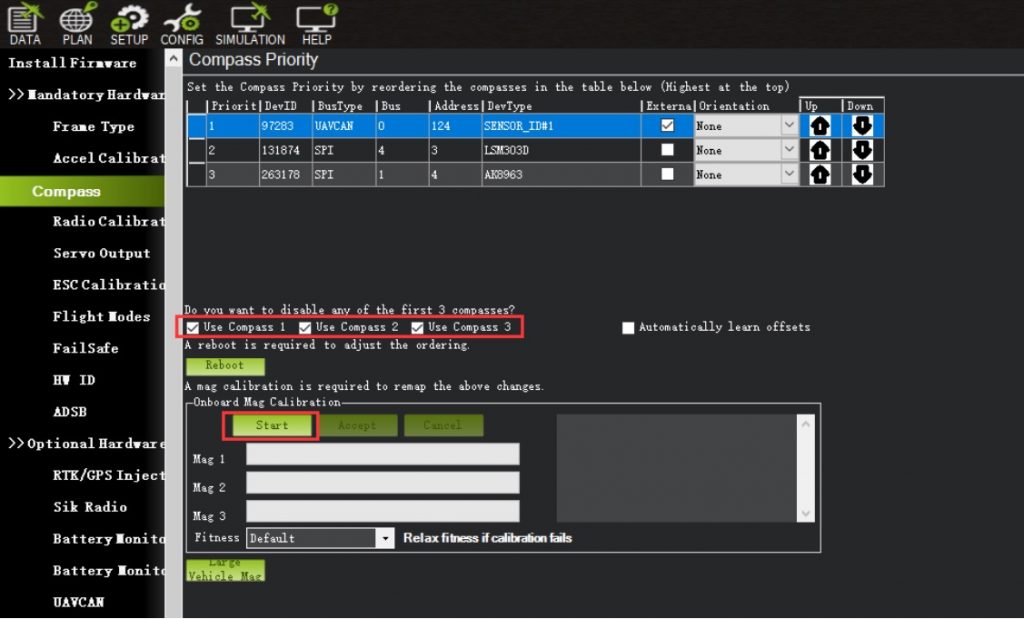
Pusula Ayarı (Mevcut bellenimi kullanarak):
Güvenlik anahtarı yok. Güvenlik anahtarı, BRD_SAFETYENABLE 0 olarak değiştirilerek devre dışı bırakılabilir. Harici güvenlik anahtarının GPS1 portuna bağlanması da bir seçenektir.
Cube Black kullanırken pusulalar yukarıdan aşağıya 1,2 ve 3 olarak sıralanır; Cube Orange kullanırken pusulalar yukarıdan aşağıya 1 ve 2 olarak sıralanır. Varsayılan olarak en son harici CAN pusulası seçilir.
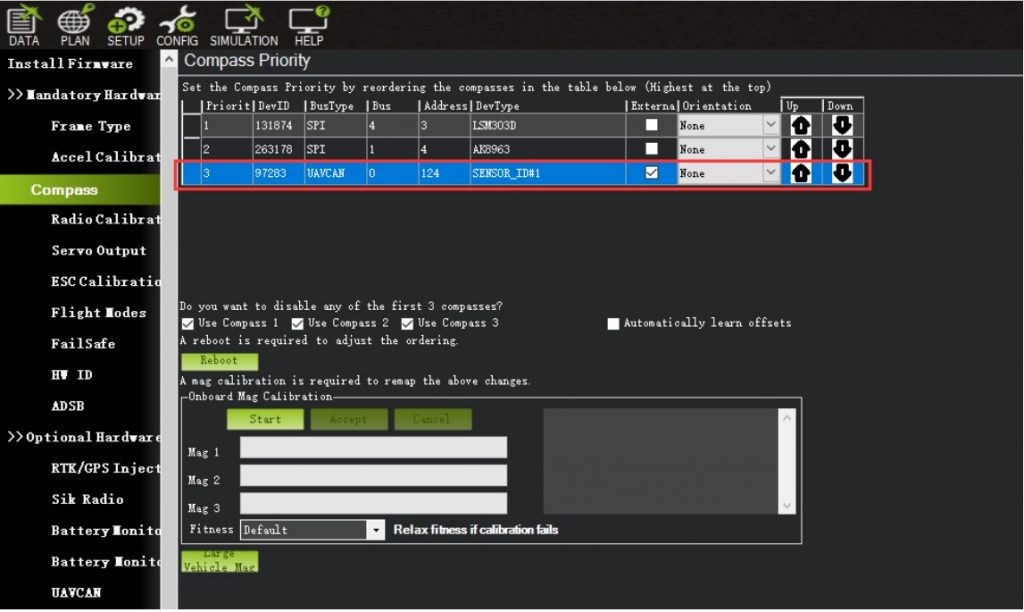
Harici CAN pusulasını pusula 1 olarak ayarlamak için pusulayı yukarı hareket ettirin.
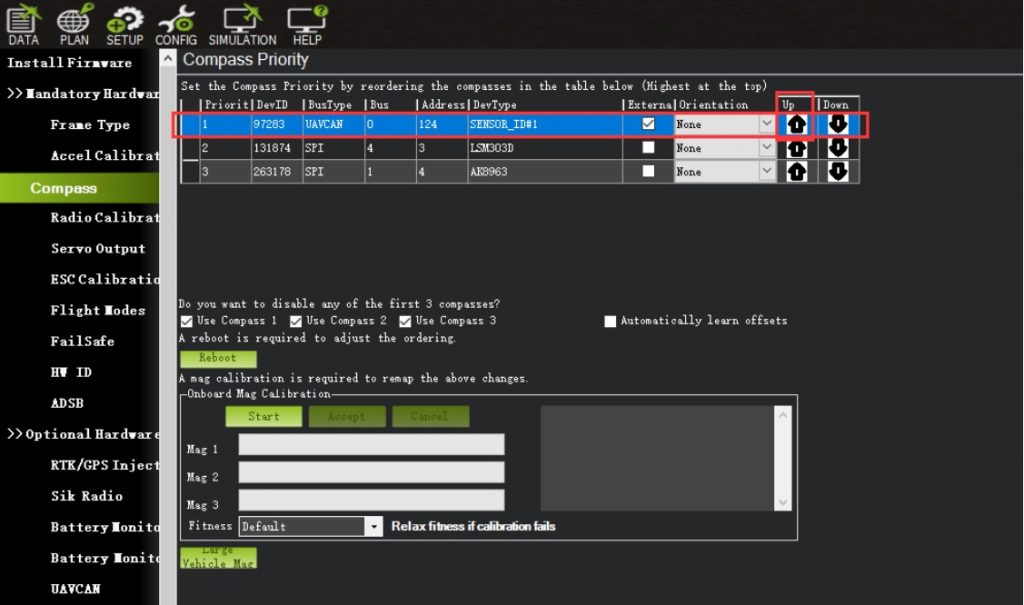
Kullanarak pusulaları seçin (genellikle varsayılan ayar iyidir) ve pusulaları kalibre etmek için “Başlat”a tıklayın.
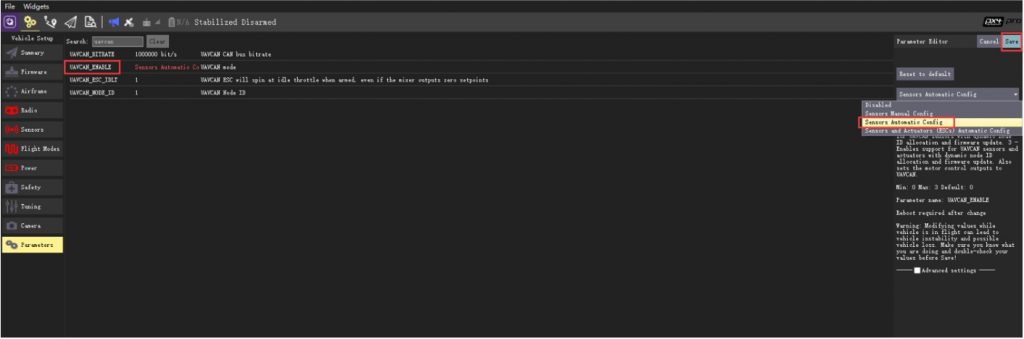
PX4 ile kullanma:
Yazma sırasında, PX4 v1.12 beta 3 kullanılıyor.
PX4 üretici yazılımını yükleyin. 4pin CAN kablosunu CAN1 veya CAN2 bağlantı noktasına bağlayın. Ardından HerePro’ya 6V – 40V güç sağlayın. GCS aracılığıyla otomatik pilota bağlanın. _ENABLE oSensors Automatic Config parametresini değiştirin ve otomatik pilotu yeniden başlatın.
LED Kontrolü
HerePro üzerindeki LED dizileri Lua betiğini destekler. Komut dosyası HerePro’daki SD karta kaydedilebilir.
Varsayılan ayar için resmi bir Lua betiği vardır. Gerekirse SD karta koyun.
Ön koşullar: HerePro’yu Rover moduna ayarlayın. Ardından USB aracılığıyla Mission Planner’a bağlayın ve komut dosyasını HerePro’ya yükleyin.
4pin CAN kablosunu HerePro’daki sol taraftaki CAN bağlantı noktasından otomatik pilotta CAN1 veya CAN2’ye bağlayın. Ardından HerePro’ya 6V – 40V sağlayın.
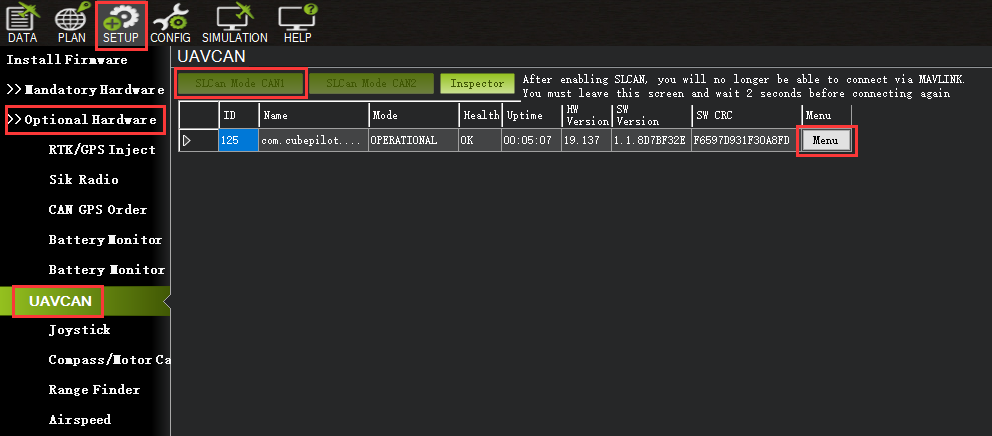
Otomatik pilotu USB aracılığıyla Mission Planner’a bağlayın. Başlangıç Ayarları > İsteğe Bağlı Donanım > DRONECAN sayfasına gidin ve SLCan Modu CAN1’e tıklayın. CAN cihaz durumu görünecektir. Aşağıdaki parametreleri değiştirmek için sağ taraftaki Menü > parametreler’e tıklayın:
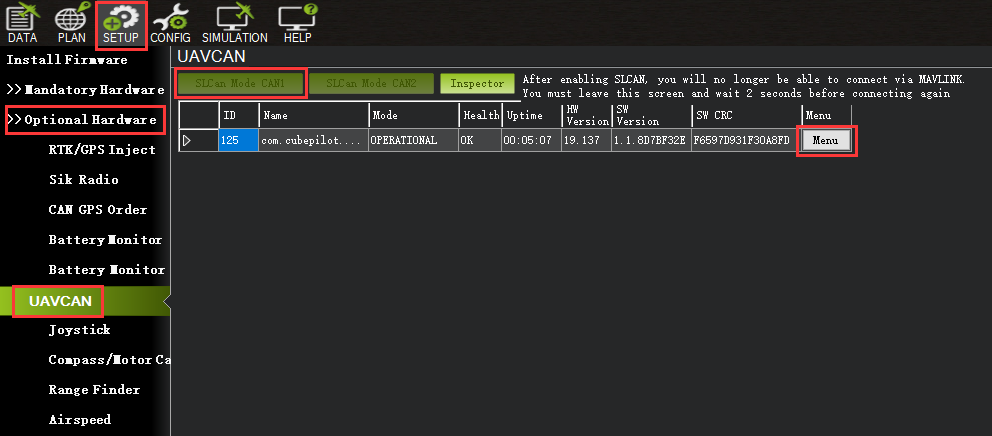
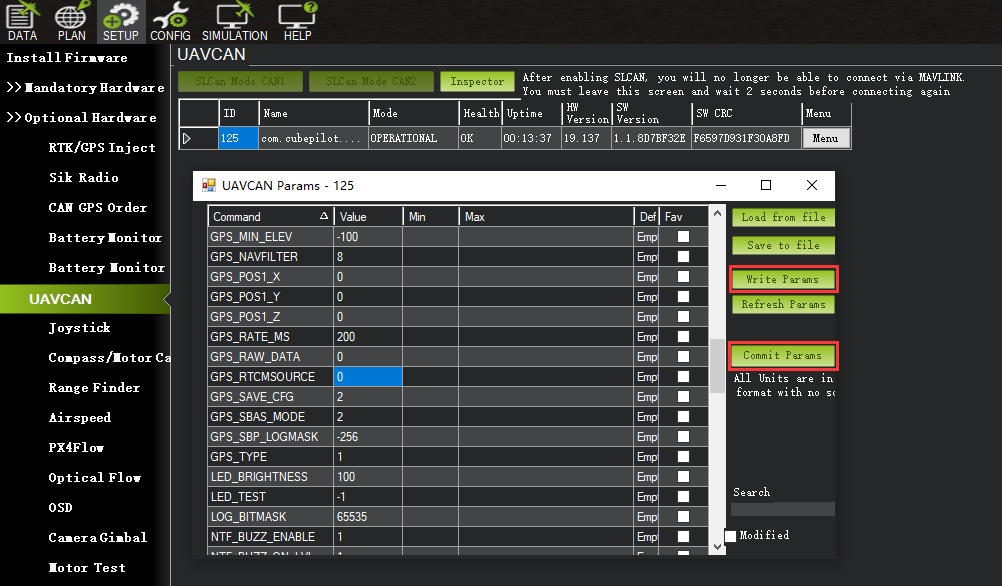
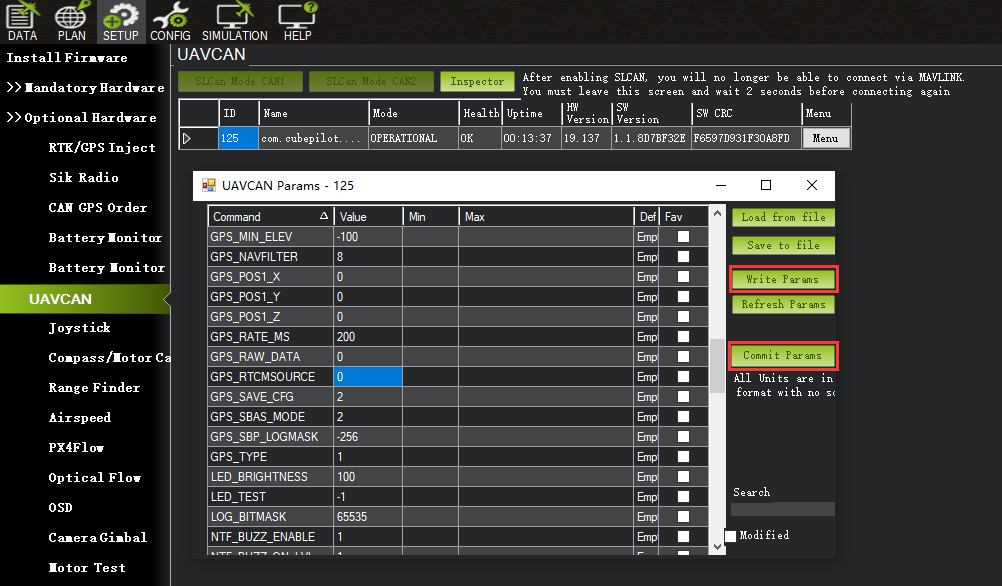
“GPS_TYPE” = 1, “GPS_RTCMSOURCE” = 0, “SERIALPASS” = 0 parametrelerini değiştirin. Bundan sonra, params yaz ve ardından Paramları Commit’e tıklayın ve HerePro’yu yeniden başlatın.
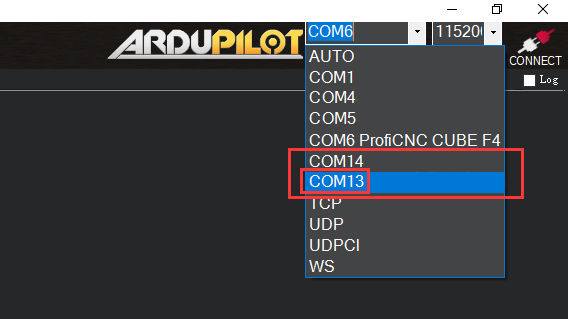
HerePro’yu kapatıp açtıktan sonra, USB portu üzerinden bilgisayara bağlayın. HerePro için 2 tane olduğundan alt COM portunu seçin.
Bağlandıktan sonra Config > MAVFtp > APM > scripts ekranına gidin ve sağ tıklayın. Yeni Lua komut dosyasını içe aktarmak için Yükle’ye tıklayın. Ardından HerePro’yu yeniden başlatın.
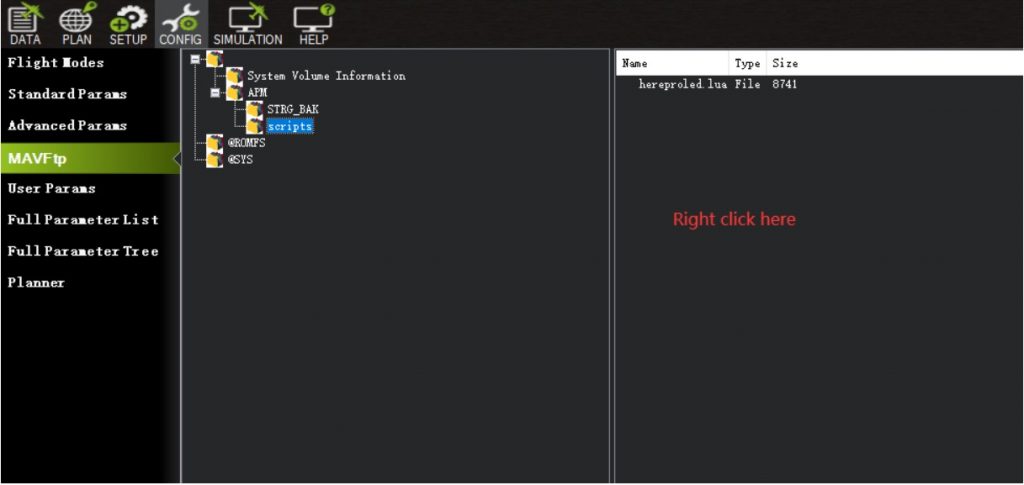
(“Right click here”); buraya sağ tıklayın.
Bellenim güncellemesi (Firmware update)
Gelecekte herhangi bir ürün yazılımı güncellemesi varsa güncelleme prosedürleri aşağıdaki gibidir.
Görev Planlayıcı, yeni özelliğin kullanılabilir olması için daha sonraki veya aşağıdaki sürümde olmalıdır:

4pin CAN kablosunu HerePro’daki sol taraftaki CAN bağlantı noktasından otomatik pilotta CAN1 veya CAN2’ye bağlayın. Ardından HerePro’ya 6V – 40V sağlayın. Otomatik pilotu Mission Planner’a bağlayın ve DRONECAN ekranına gidin. CAN GPS durumunu yüklemek için SLCan Modu CAN1’e tıklayın.
HerePro için herhangi bir aygıt yazılımı güncellemesi olup olmadığını kontrol etmek için Menü > Güncelle’ye tıklayın.
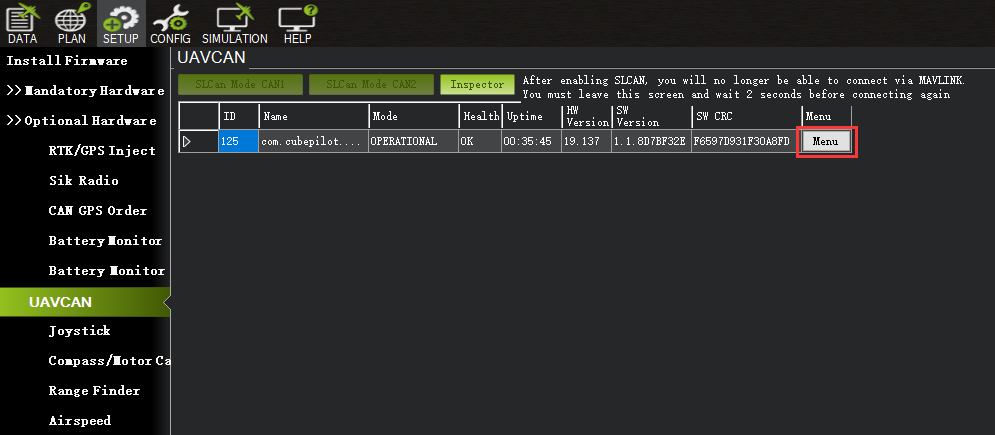
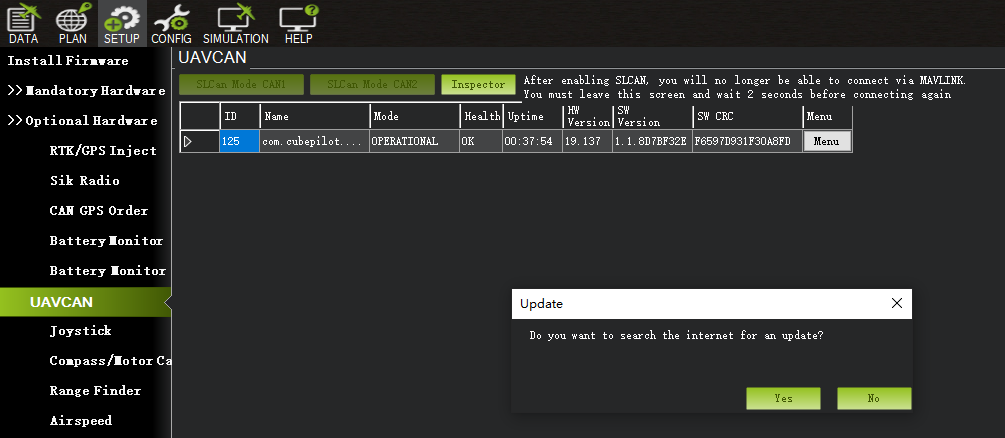
Güncelle düğmesini tıklayın. Açılır ve güncelleme için internette arama yapmak isteyip istemediğinizi soran bir pencere. Evet’i tıklayın.
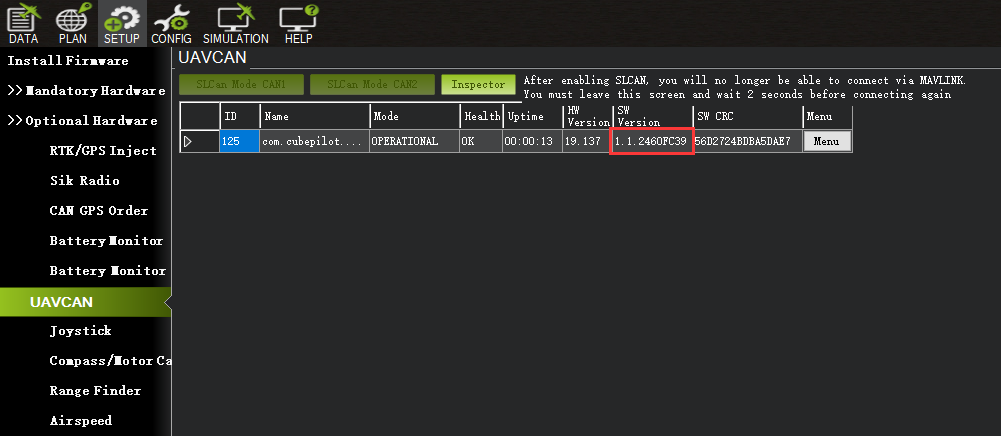
Ürün yazılımı güncellemesinin tamamlanmasını bekleyin. Yazılım Sürümündeki değişikliği onaylayın. Güncelleme başarılı olduysa HerePro’yu yeniden başlatın.
RTK kılavuzu
Baz sörveyi/gezi konumlandırması için Görev Planlayıcıyı kullanma
Eğitimde, gösterim için Mission Planner ve Arducopter-4.0.7 kullanılacaktır.
RTK için 2 adet HerePro modülü gereklidir. Biri üs (base) olarak, diğeri gezici (rover) olarak.
Kurulum:
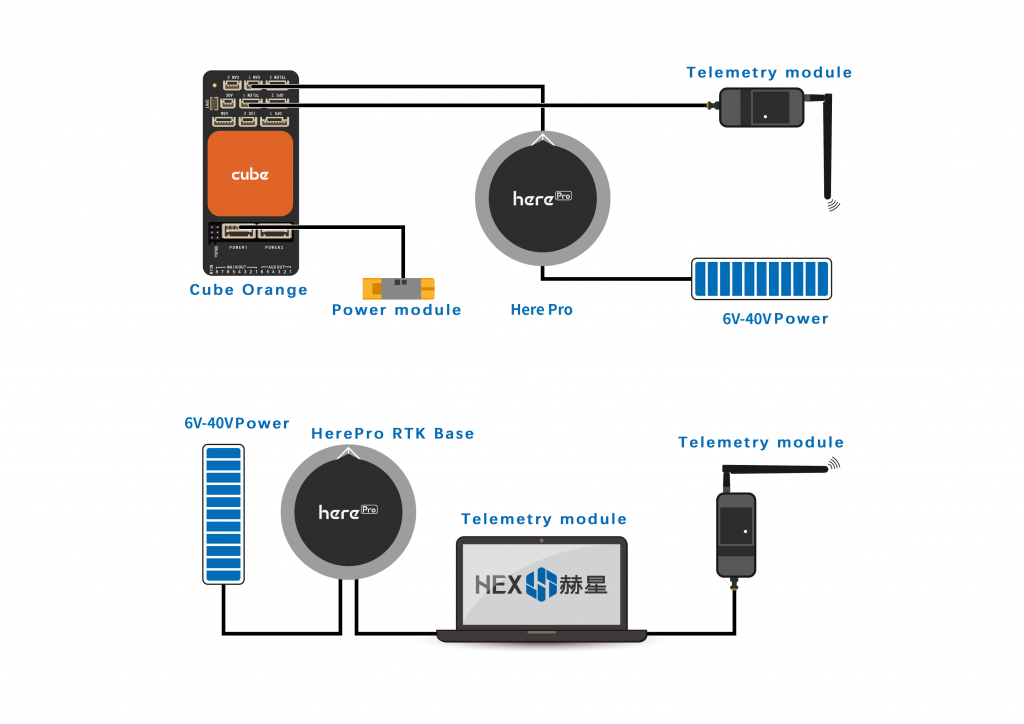
HerePro RTK’yı kullanmak için şu donanıma ihtiyacınız olacak: otopilot, bilgisayar, telemetri, HerePro x2, 6V-40V güç kaynağı, Tripod(Stand)
Aşağıdaki işlemler, biri sırasıyla temel ve diğeri gezici olmak üzere 2 HerePro modülü kullanır. Parametrelerini ayarlamak için onları 1’e 1 bağlayın.
HerePro RTK gezici parametre ayarları:
4pin CAN kablosunu HerePro’nun sol tarafındaki CAN bağlantı noktasından otopilotta CAN1 veya CAN2’ye bağlayın. Ardından HerePro’ya 6V – 40V güç sağlayın.
Otomatik pilotu USB aracılığıyla Mission Planner’a bağlayın. Başlangıç Ayarları > İsteğe Bağlı Donanım > DRONECAN sayfasına gidin ve SLCan Modu CAN1’e tıklayın. CAN cihaz durumu görünecektir. Aşağıdaki parametreleri değiştirmek için sağ taraftaki Menü > parametreler’e tıklayın:
Parametreleri “GPS_TYPE = 1“ , “GPS_RTCMSOURCE = 10” , “SERIALPASS = 0“ , “CAN_NODE = 9” olacak şekilde değiştirin. Ardından write params tıklayın ve Commit Params tıklayın. HerePro bağlantısını kesin. Diğer HerePro ile bağlantı kurun ve devam edin.
HerePro Base parametre ayarları:
4pin CAN kablosunu HerePro’daki sol taraftaki CAN bağlantı noktasından otomatik pilotta CAN1 veya CAN2’ye bağlayın. HerePro’ya 6V – 40V sağlayın.
Otopilotu USB aracılığıyla Mission Planner’a bağlayın. Başlangıç Ayarları > İsteğe Bağlı Donanım > DRONECAN sayfasına gidin ve SLCan Modu CAN1’e tıklayın. CAN cihaz durumu görünecektir. Aşağıdaki parametreleri değiştirmek için sağ taraftaki Menü > parametreler’e tıklayın:
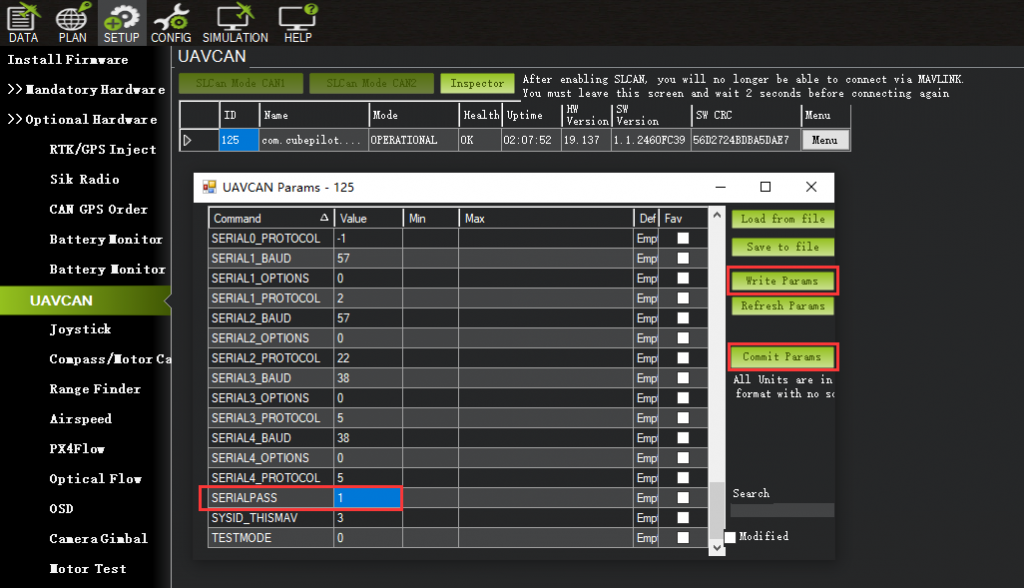
Parametreleri “SERIALPASS = 1” değiştirin. Ardından write params tıklayın ve Commit Params tıklayın. HerePro ile bağlantınızı kesin.
Kullanmadan önce lütfen her şeyin doğru şekilde bağlandığından emin olun.:
Base: HerePro tabanını 6V-40V ile güçlendirin. USB portunu bilgisayarın USB portuna bağlayın. Bir telemetriyi bilgisayardaki başka bir bağlantı noktasına bağlayın.
Rover: HerePro’yu 6V-40V ile çalıştırın. Otopilotta CAN1 portuna bağlayın. Oto pilotta TELEM1 bağlantı noktasına bir telemetri bağlayın.
Anten Yerleşimi:
Hassas RTK konumlandırması elde etmek için RTK Anten yerleşimi çok önemlidir
RTK çalışmak için çok daha iyi bir ortam gerektirir. Anteninin yerleştirilmesiyle ilgili özel gereksinimler vardır.
En iyi ortam, taban ve gezici antenin ufkun 20 derece üzerinde gökyüzünü net bir şekilde görebilmesini gerektirir. RTK anteni yükseltilebilir ancak etrafta bina, ağaç, araba vb. engellerin olmadığından emin olun.
Kötü bir çevre örneği: kapalı, kalabalık kentsel alan, orman, yere yakın.
İyi bir çevre örneği: Açık alanlar, dağların zirvesi, binaların çatıları.
Anteni elektronik cihazların yakınına yerleştirmeyin, çünkü yakınlardaki yüksek güçlü elektronik cihazlar, GPS sinyalini engelleyen frekans gürültüsü üretebilir. Örnekler, cep telefonu baz istasyonları, yüksek gerilim transformatörleri vb.
İyi uydu sinyali elde etmek için lütfen baz istasyonunu yeterli gökyüzü kapsama alanına sahip bir dış ortama yerleştirin. Baz istasyonunu tripod gibi sabit ve yükseltilmiş bir platform üzerine yerleştirin.
Görev Planlayıcı kullanarak Temel Modül Ayarı:
Temel modül kurulumuyla başlayın. Baz istasyonu kurulumu sırasında gezici ve UAV’nin açılmasına gerek yoktur.
Bilgisayarda Mission Planner yer istasyonu yazılımını açın ve “ilk kurulum → Opsiyonel Donanım → RTK/GPS Inject” seçeneğine gidin. Aşağıdaki sayfayı göreceksiniz:
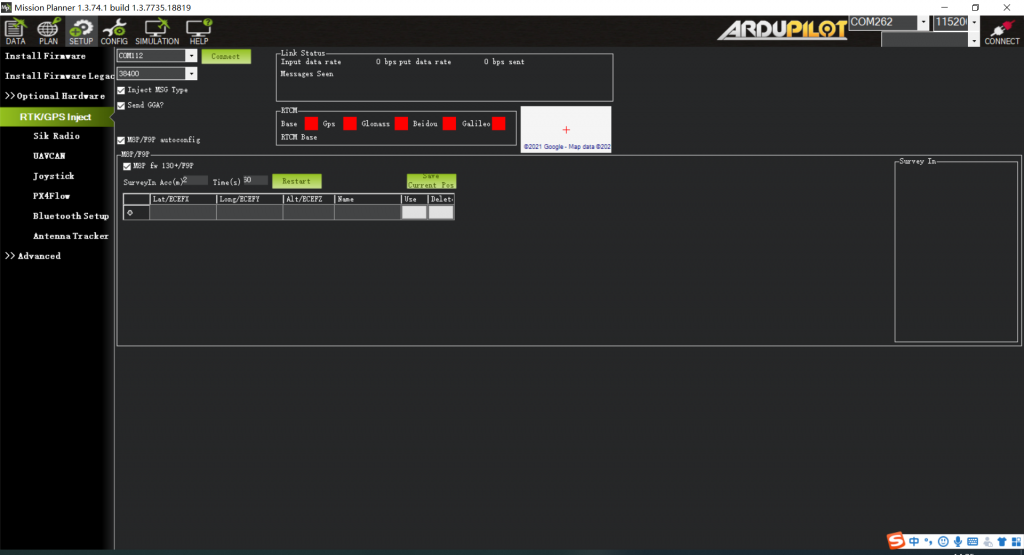
Sol üst köşede doğru temel modül COM bağlantı noktasını seçin (HerePro için 2 COM bağlantı noktası vardır. Örn: COM13 ve COM14. Alttakini seçin.). 38400 baud hızını seçin. GGA Gönder seçeneğinin işaretini kaldırın. “M8P/F9P otomatik yapılandırma” ve “M8P fw 130+/F9P”yi kontrol edin. Ardından bağlan’a tıklayın. SurveyIn Acc bölümünde, beklenen mutlak coğrafi doğruluğu girin. Zaman sütununa, beklenen minimum anket süresini girin. Yeniden Başlat’ı tıklayın. Yer istasyonu şimdi girdiğiniz verileri HerePro üssüne aktaracak, temel modül ölçmeye başlayacaktır. Aşağıdaki ekranı göreceksiniz:
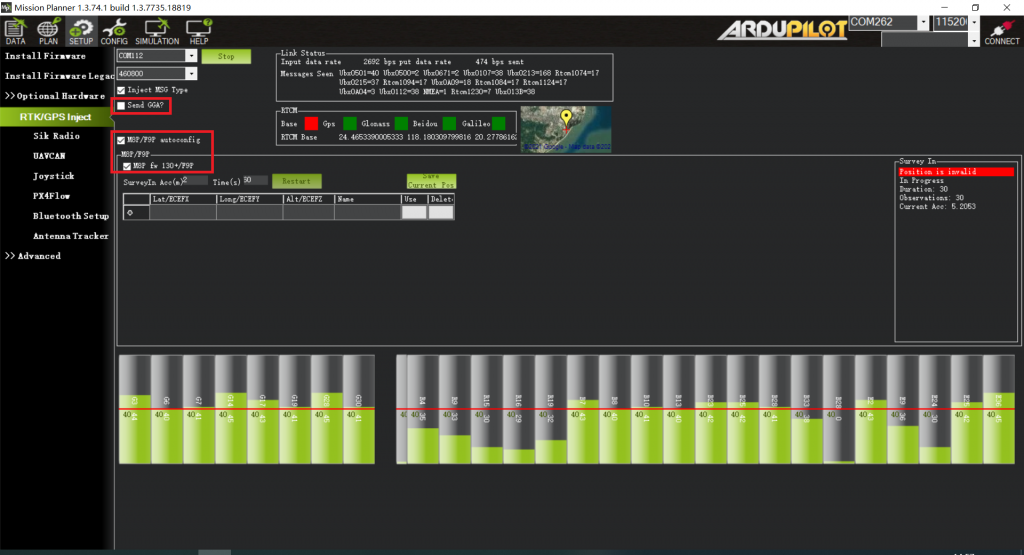
Anket işlemi sırasında, sağdaki kutu mevcut anket durumunu gösterecektir:
- Konum geçersiz: Baz istasyonu henüz geçerli bir konum elde etmedi;
- Devam Ediyor: Anket hala devam ediyor;
- Süre: Mevcut ölçme görevinin başladığı andan itibaren geçen saniye sayısı;
- Gözlem: Elde edilen gözlem sayısı;
- Current Acc: Mevcut baz istasyonunun ulaşabileceği mutlak coğrafi doğruluk;
- Görev Planlayıcı sayfasının alt kısmındaki Yeşil çubuk, algılanan uyduları gösterir ve sinyal gücü her bir uyduya karşılık gelir. En az sekiz veya daha fazla uydu sinyalinin kırmızı çizgiden daha yüksek olduğundan emin olun (Uydu, yalnızca sinyali kırmızı çizgiyi aşarsa etkin uydu sayısına sayılır).
Lütfen buradaki baz istasyonunun mutlak coğrafi doğruluğunun gezici modülünün mutlak coğrafi doğruluğunu etkileyeceğini, ancak baz istasyonu ile gezici arasındaki göreceli doğruluğun etkilenmediğini unutmayın. Uygulamanız yüksek mutlak coğrafi doğruluğa sahip İHA gerektirmiyorsa, baz istasyonunun hassasiyetini çok yüksek ayarlamanıza gerek yoktur, bu da uzun ölçüm süresine neden olabilir.
Baz istasyonunun doğruluğu 1,5 ila 2 m olsa bile, gezici modülün baz istasyonuna göre konum doğruluğu yine de santimetre seviyesine ulaşabilir.
Anket tamamlandıktan sonra, Görev Planlayıcı aşağıdaki sayfayı görüntüleyecektir:
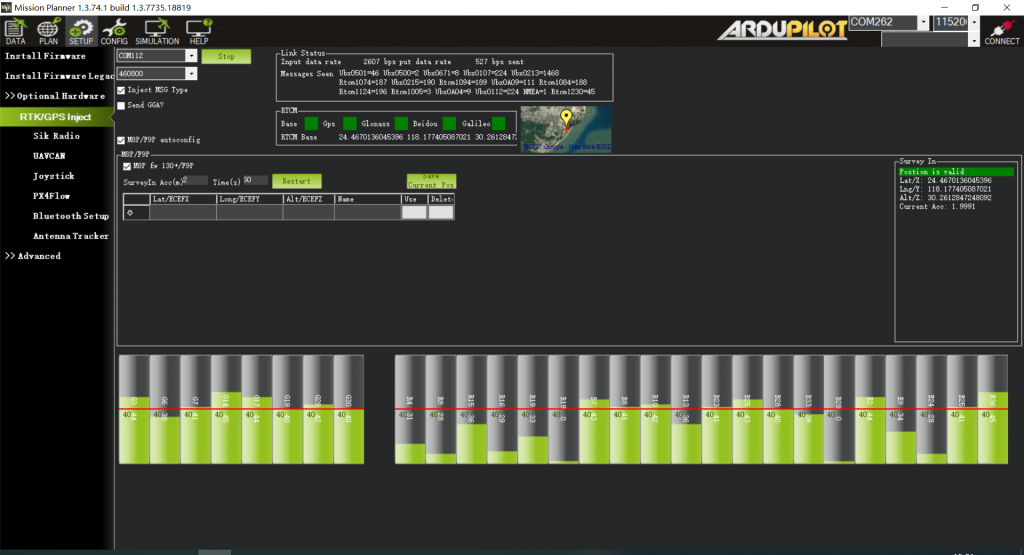
RTCM kutusunda, temel durum göstergesi yeşildir ve farklı GNSS sistemleri için göstergeler de yeşildir. Sağdaki kutu, Pozisyonun geçerli olduğunu gösterir.
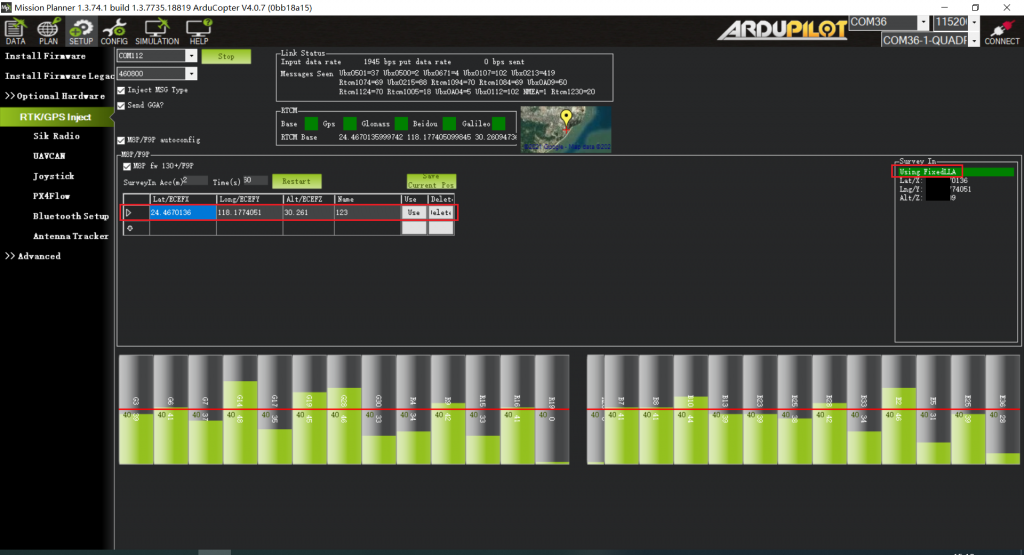
Mevcut konumu Görev Planlayıcı’da saklamak için: Mevcut Konumu Kaydet’e tıklayın, diyalog kutusuna bir ad girin ve Tamam’a tıklayın. Aşağıda gösterildiği gibi, kayıtlı konumunuzu listede görebilirsiniz. Kaydettiğiniz konum için Kullan düğmesine tıklayın, durum FixedLLA Kullanılıyor gösterecektir. Baz istasyonunu daha sonra aynı konuma ayarlarsanız tekrar anket yapmanıza gerek kalmaz. Kaydettiğiniz konuma karşılık gelen Kullan düğmesine tıklayabilirsiniz.
Rover Modülü ve Uçuş Kontrol Cihazı Kurulumu
Baz istasyonu kurulduktan sonra İHA’yı açabilirsiniz. Telemetriyi bağlamak için aynı Görev Planlayıcıyı kullanarak, baz istasyonu verileri telemetri aracılığıyla UAV üzerindeki HerePro gezicisine iletilecektir. Görev Planlayıcı ana sayfasında, UAV konumlandırmanın RTK moduna girdiğini belirten RTK Float / RTK Sabit / 3D RTK olarak gösterilen mevcut GPS durumunu göreceksiniz. RTK Float bir kayan nokta çözümüdür; RTK Sabit, sabit bir çözümdür. RTK Sabit modu daha yüksek doğruluğa sahiptir ve daha iyi sinyal gücü gerektirir. 3D RTK, Mission Planner Çince versiyonunda RTK Float / RTK’nın birleşik bir ifadesidir.

Tek Tabandan Birden Çok Rover’a:
Bunu yapmanın 2 yöntemi vardır:
1 telemetriyi çoklu telemetri yayınıda kullanma; veya
USB hub ile birden fazla 1’e 1 telemetri modülü kullanma
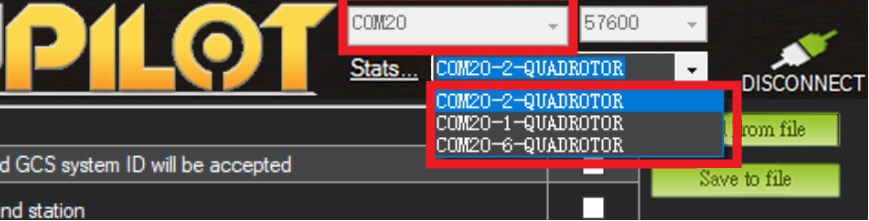
Yer istasyonu konfigürasyonu: tüm telemetri modüllerini bilgisayara USB hub aracılığıyla bağlayın. Üssü bulmak için Görev Planlayıcı’yı açın ve ardından uçuş kontrolörlerine bağlayın. Aşağıda gösterildiği gibi OTOMATİK bağlanmayı seçin. Limanlardaki tüm tanınan uçuş kontrolörleri bağlanacaktır. Aşağıdaki açılır listeden İHA’yı seçebilirsiniz:

İHA’ları 1 telemetri modülü ile bağladıysanız, aynı COM portunu paylaşmaları gerekir: