
Cube Kablolama Hızlı Başlangıç
Bu hızlı başlangıç kılavuzu, Cube® uçuş kontrolörlerine nasıl güç verileceğini ve en önemli çevre birimlerinin nasıl bağlanacağını gösterir.
Uyarı
Cube Black, PX4 tarafından tamamen desteklenirken, Cube Yellow ve Cube Orange desteğinin Deneysel olduğunu unutmayın.
İPUCU
Talimatlar, Cube Black, Cube Yellow ve Cube Orange dahil olmak üzere tüm Cube çeşitleri için geçerlidir. Daha fazla/güncel bilgi Cube Kullanım Kılavuzunda bulunabilir (yeni pencere açar/ingilizce)(Cube Docs).
Aksesuarlar
Cube, satın aldığınızda ihtiyaç duyacağınız aksesuarların çoğu (veya tümü) ile birlikte gelir.

Bunun istisnası, bazı kitlerin ayrı olarak satın alınması gereken bir GPS içermemesidir (aşağıya bakın).
Kablolamaya Genel Bakış
Aşağıdaki resim, Pixhawk sisteminize en önemli sensörlerin ve çevre birimlerinin nasıl bağlanacağını gösterir. Aşağıdaki bölümlerde bunların her birini ayrıntılı olarak inceleyeceğiz.
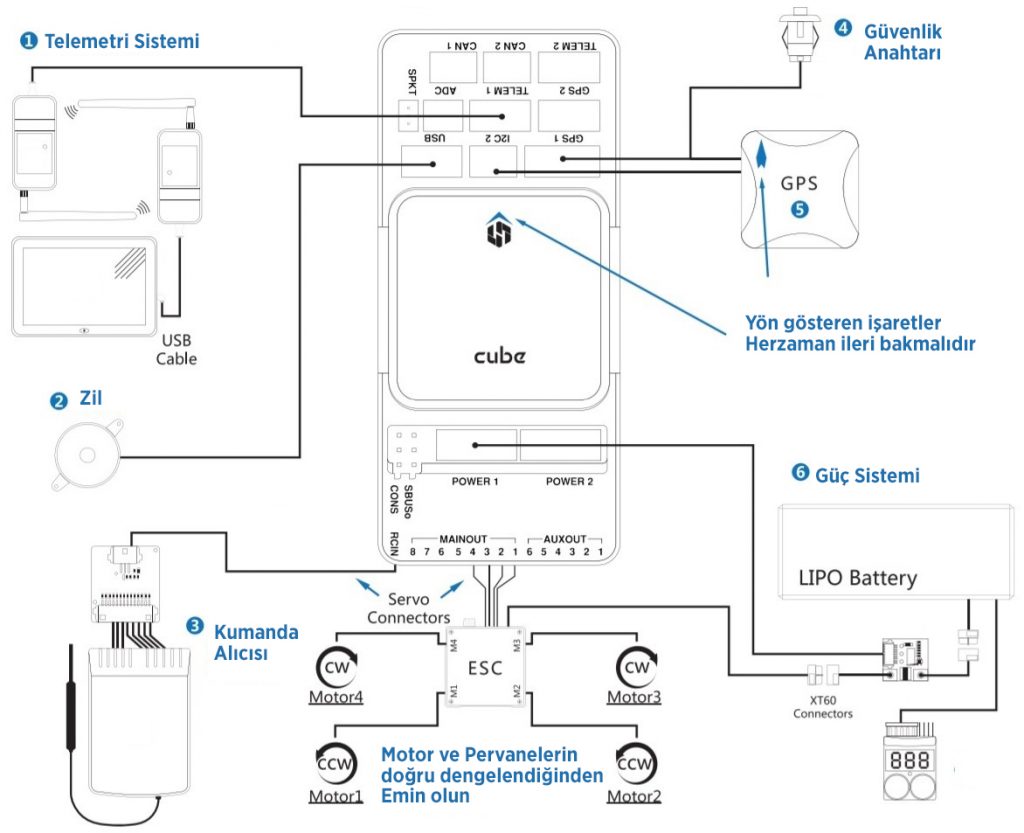
- Telemetri Sistemi — Görevleri planlamanıza/çalıştırmanıza ve aracı gerçek zamanlı olarak kontrol etmenize ve izlemenize olanak tanır. Tipik olarak telemetri radyoları, tablet/PC ve yer istasyonu yazılımını içerir.
- Buzzer — İHA’nın ne yaptığını gösteren ses sinyalleri sağlar
- Uzaktan Kumandalı Alıcı Sistemi — Bir operatörün aracı manuel olarak uçurmak için kullanabileceği bir el vericisine bağlanır (gösterilen, PWM->PPM dönüştürücülü bir PWM alıcısıdır).
- (Adanmış) Güvenlik anahtarı — Motorları kilitlemek ve kilidini açmak için basılı tutun. Yalnızca dahili güvenlik anahtarıyla önerilen GPS’i kullanmıyorsanız gereklidir.
- GPS, Pusula, LED, Güvenlik Anahtarı — Önerilen GPS modülünde GPS, Pusula, LED ve Güvenlik Anahtarı bulunur.
- Güç Sistemi — Küpü ve motor ESC’lerini Güçlendirir. LiPo pil, güç modülü ve isteğe bağlı pil uyarı sisteminden oluşur (pil gücü önceden tanımlanmış bir seviyenin altına düşerse sesli uyarı).
Not
GPS2 etiketli bağlantı noktası, PX4‘te TEL4 ile eşleşir (yani, GPS2 etiketli bağlantı noktasına bağlanılıyorsa, bağlı donanım için seri bağlantı noktası yapılandırma parametresini TEL4’e atayın).
İPUCU
Kullanılabilir bağlantı noktaları hakkında daha fazla bilgiyi burada bulabilirsiniz: Küp > Bağlantı Noktaları.
Denetleyiciyi Monte Etme ve Yönlendirme
Pixhawk Cube’ü aracınızın ağırlık merkezine mümkün olduğunca yakın, ideal olarak üst tarafı yukarı bakacak şekilde ve ok aracın önünü gösterecek şekilde monte edin (küpün üstündeki ince ok işaretine dikkat edin)

Not
Kontrolör önerilen/varsayılan yönde monte edilemezse (ör. alan kısıtlamaları nedeniyle), otomatik pilot yazılımını gerçekte kullandığınız yön ile yapılandırmanız gerekecektir:Bkz. Uçuş Kontrol Cihazı Yönlendirmesi.
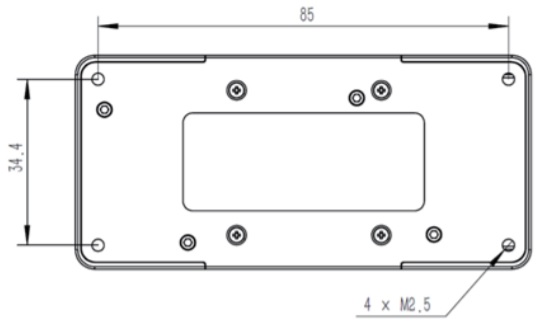
Küp, titreşim sönümleyici köpük pedler (kite dahildir) veya montaj vidaları kullanılarak monte edilebilir. Cube aksesuarlarındaki montaj vidaları 1,8 mm kalınlığında bir çerçeve için tasarlanmıştır. Özelleştirilmiş vidaların, Cube içinde 6mm~7.55mm aralığında diş uzunluğuna sahip M2.5 olması gerekir.
GPS + Pusula + Emniyet Anahtarı + LED
Önerilen GPS modülleri, her ikisi de bir GPS modülü, Pusula, Güvenlik Anahtarı ve LED’ler içeren Here ve Here+’dır. Modüller arasındaki fark, Here+’nın RTK aracılığıyla santimetre seviyesinde konumlandırmayı desteklemesidir. Aksi takdirde aynı şekilde kullanılırlar/bağlanırlar.
UYARI
Here+‘nın yerini bir pusula ve LED’ler içeren (ancak güvenlik anahtarı olmayan) Here3 (yeni pencereyi açar) bir UAVCAN RTK-GNSS almıştır. Nasıl bağlanması gerektiğine ilişkin belgeler için UAVCAN’a bakın.
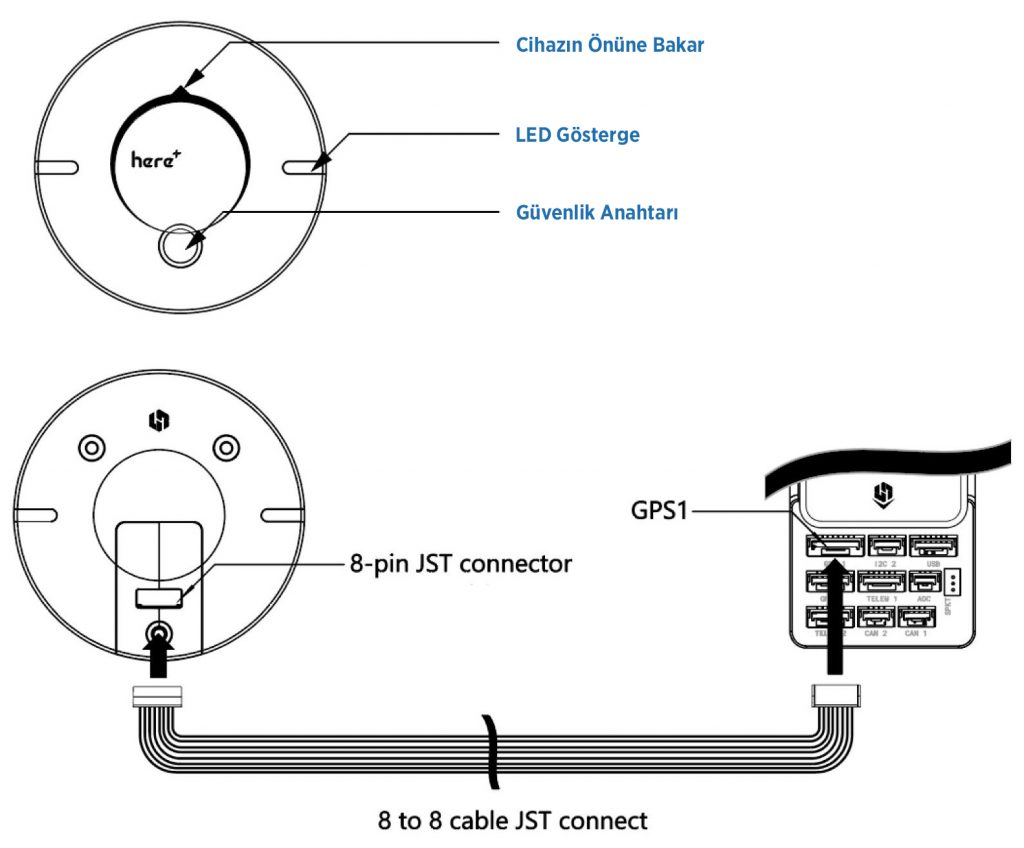
Modül, yön işaretçisi aracın önüne doğru olacak şekilde diğer elektronik aksamlardan mümkün olduğunca uzağa çerçeveye monte edilmelidir (pusulayı diğer elektroniklerden ayırmak paraziti azaltacaktır). Verilen 8 pimli kablo kullanılarak GPS1 bağlantı noktasına bağlanmalıdır.
Aşağıdaki şema, modülün ve bağlantılarının şematik bir görünümünü göstermektedir.
Not
GPS modülünün entegre güvenlik anahtarı varsayılan olarak etkindir (etkinleştirildiğinde, PX4, aracı kurmanıza izin vermez). Güvenliği devre dışı bırakmak için güvenlik anahtarını 1 saniye basılı tutun. Güvenliği etkinleştirmek ve aracı devre dışı bırakmak için güvenlik anahtarına tekrar basabilirsiniz (bu, herhangi bir nedenle aracı uzaktan kumandanızdan veya yer istasyonunuzdan devre dışı bırakamıyorsanız yararlı olabilir).
İPUCU
Eski tarz 6 pinli bir GPS modülü kullanmak istiyorsanız, kit, hem GPS’i hem de Güvenlik Anahtarını bağlamak için kullanabileceğiniz bir kablo ile birlikte gelir.
Güvenlik anahtarı
Cube ile birlikte gelen özel güvenlik anahtarı, yalnızca önerilen GPS’i (dahili bir güvenlik anahtarına sahiptir) kullanmıyorsanız gereklidir.
GPS olmadan uçuyorsanız, aracı çalıştırabilmek ve uçabilmek için anahtarı doğrudan GPS1 bağlantı noktasına takmalısınız (veya eski tarz 6 pinli bir GPS kullanıyorsanız, verilen bir kabloyla)
Zil
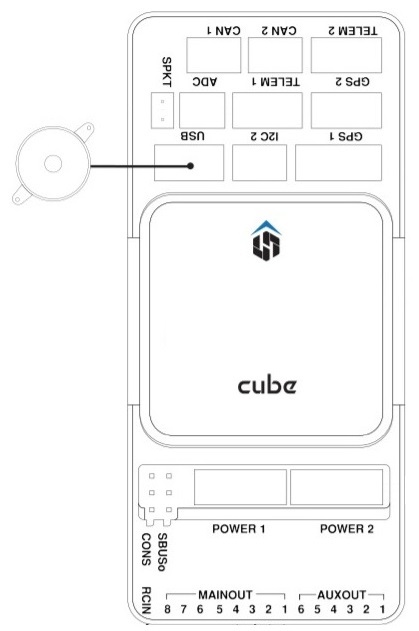
Zil, araç durumunun sesli olarak bildirilmesini sağlayan tonlar ve melodiler çalar (başlangıç sorunlarını gidermeye yardımcı olan ve aracın güvenli çalışmasını etkileyebilecek koşulları bildiren tonlar dahil).
Zil, gösterildiği gibi USB bağlantı noktasına bağlanmalıdır (başka bir yapılandırma gerekmez).
Radyo Kontrolü
Aracınızı manuel olarak kontrol etmek istiyorsanız bir uzaktan kumandalı (RC) radyo sistemi gereklidir (PX4, otonom uçuş modları için bir radyo sistemi gerektirmez).
Uyumlu bir verici/alıcı seçmeniz ve ardından iletişim kurmaları için bunları bağlamanız gerekecektir (belirli verici/alıcınızla birlikte gelen talimatları okuyun).
Aşağıdaki talimatlar, farklı tipteki alıcıların nasıl bağlanacağını gösterir.
PPM-SUM / Futaba S.Bus alıcıları
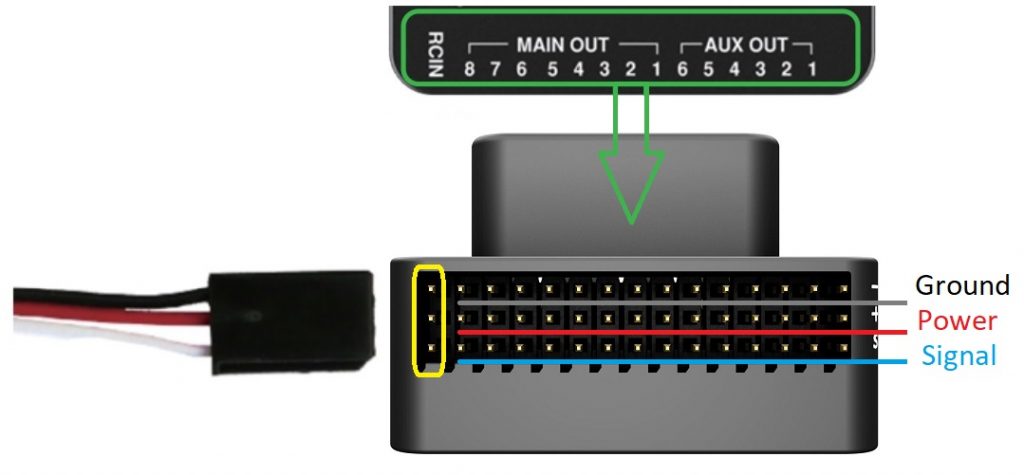
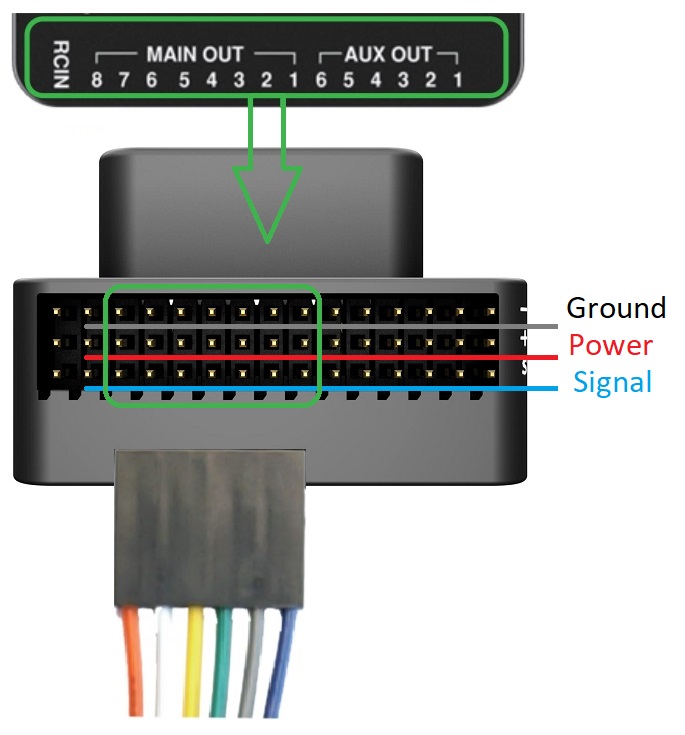
Sağlanan 3 kablolu servo kablosunu kullanarak toprak (-), güç (+) ve sinyal (S) kablolarını RC pinlerine bağlayın.
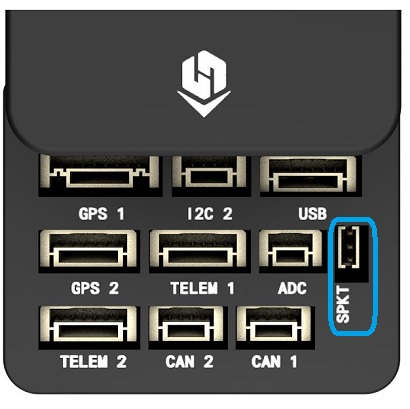
Spektrum Uydu Alıcıları
Spektrum DSM, DSM2 ve DSM-X Uydu RC alıcıları SPKT/DSM bağlantı noktasına bağlanır.
PWM Alıcıları
Cube, her kanal için ayrı bir kablosu olan PPM veya PWM alıcılarına doğrudan bağlanamaz. Bu nedenle PWM alıcıları, hex.aero veya proficnc.com’dan satın alınabilecek bir PPM kodlayıcı modülü aracılığıyla RCIN bağlantı noktasına bağlanmalıdır.
Güç
Pixhawk Cube, tipik olarak, POWER1 bağlantı noktasına bağlı bir Güç Modülü (kitle birlikte verilir) aracılığıyla bir Lityum İyon Polimer (LiPo) Pilden güç alır. Güç modülü, karta güvenilir besleme ve voltaj/akım göstergesi sağlar ve bir multikopter araçta motorları sürmek için kullanılan ESC’lere ayrı ayrı güç sağlayabilir.
Bir Multicopter(Drone) aracı için tipik bir güç kurulumu aşağıda gösterilmiştir.
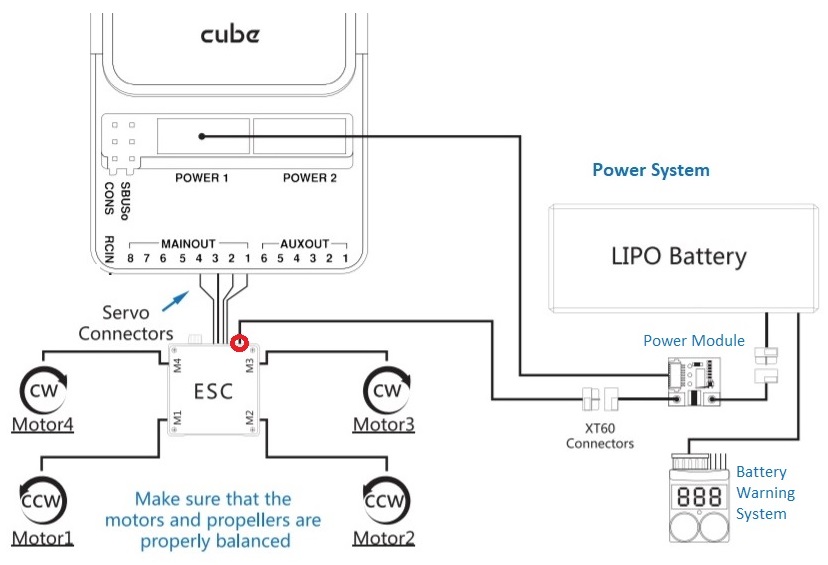
Not MAIN/AUX’un güç (+) rayına güç modülü, uçuş kontrolörüne sağlanan güç tarafından sağlanmaz. Dümenler, yükseltiler vb. için servoları sürmek için ayrı olarak güç verilmesi gerekir.
Bu, güç rayını BEC donanımlı bir ESC’ye, bağımsız bir 5V BEC’ye veya bir 2S LiPo pile bağlayarak yapılabilir. Kullanacağınız servo voltajının uygun olduğundan emin olun!
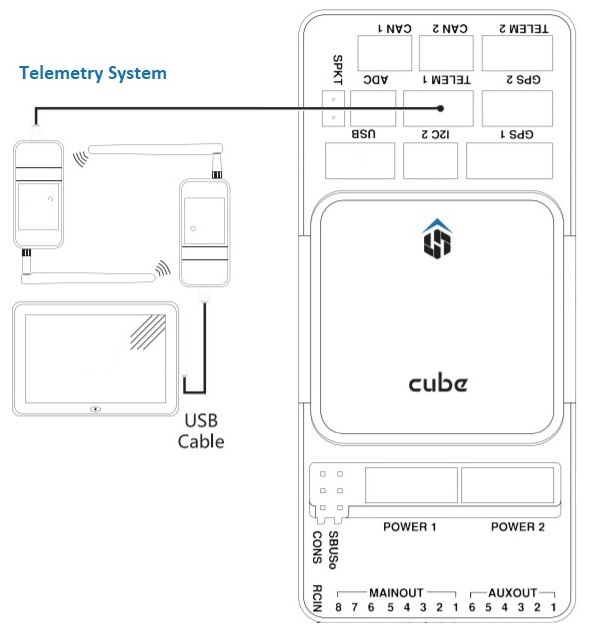
Telemetri Sistemi (Opsiyonel)
Bir telemetri sistemi, bir yer istasyonundan uçuş halindeki bir araçla iletişim kurmanıza, izlemenize ve kontrol etmenize olanak tanır (örneğin, UAV’yi belirli bir konuma yönlendirebilir veya yeni bir görev yükleyebilirsiniz).
Haberleşme kanalı Telemetri Telsizleri üzerindendir. Araç tabanlı telsiz, TELEM1 bağlantı noktasına bağlanmalıdır (bu bağlantı noktasına bağlıysa başka bir yapılandırma gerekmez). Diğer radyo, yer istasyonu bilgisayarınıza veya mobil cihazınıza bağlıdır (genellikle USB aracılığıyla).
SD Kart (Opsiyonel)
Uçuş ayrıntılarını günlüğe kaydetmek ve analiz etmek, görevleri yürütmek ve UAVCAN-bus donanımını kullanmak için gerektiğinden SD kartlar şiddetle tavsiye edilir. Micro-SD kartı gösterildiği gibi Cube’a takın (zaten yoksa).

Motorlar
Motorlar/servolar, Ana Gövde Referansında aracınız için belirtilen sırayla ANA ve AUX portlarına bağlanır.
Not
Bu referans, desteklenen tüm hava ve yer çerçeveleri için motor/servo eşlemeye çıkış portunu listeler (eğer çerçeveniz referansta listelenmiyorsa, doğru tipte “genel” bir uçak çerçevesi kullanın).
Dikkat: Eşleme çerçeveler arasında tutarlı değil (örneğin, tüm düzlem çerçeveleri için gaz kelebeğinin aynı çıktıda olmasına güvenemezsiniz). Aracınız için doğru haritalamayı kullandığınızdan emin olun.
Diğer Çevre Birimleri
İsteğe bağlı/daha az yaygın bileşenlerin kablolanması ve konfigürasyonu, ayrı çevre birimleri için konu başlıkları kapsamında ele alınmaktadır.
Not
Çevre birimlerini GPS2 etiketli bağlantı noktasına bağlıyorsanız, donanım için PX4 seri bağlantı noktası yapılandırma parametresini TEL4’e atayın (GPS2’ye değil).
Yapılandırma
Konfigürasyon, QGroundControl kullanılarak gerçekleştirilir (yeni pencere açar). QGroundControl’ü indirdikten, kurduktan ve çalıştırdıktan sonra, kartı gösterildiği gibi bilgisayarınıza bağlayın.






{kind=link}