İnsansız Hava Araçları (İHA) hava akımı ve motorların kaldırma kuvvetleri ile uçuş yapabilen, yerden kumanda edilebilen veya planlanmış bir uçuş güzergahına göre havada hareket edebilen otonom cihazlardır. İHA lar kendi aralarında kanat açıklıklarına, motor tipleri ve yapılarına göre değişkenlik göstermektedir. 20 mt kanat açıklığından, avuç içi boyutuna kadar farklı çeşitlerde İHA lar mevcuttur. Günümüzde çevik hareket kabiliyetinden, bulunduğu yerden dikey iniş-kalkış yapabilmesinden ve havada asılı kalabilmesi gibi yeteneklerinden dolayı “Multicopterler” diğer İHA lara göre daha çok tercih edilmektedir. Multicopter sistemi birden fazla rotor ve pervane ile çalışan insansız hava araçlarının genel adıdır. Rotor ve pervane sayılarına göre : Bicopter(2), Tricopter(3), Quadcopter(4), Hexacopter(6), Octocopter(8) farklı isimlerle adlandırılır. Bunların arasında diğerlerine göre kısmi kontrol kolaylığı sağlayan dört rotorlu quad en popüler olanıdır. Diğer uçan platformlara göre geliştirilmeye daha açık olmalarından dolayı savunma ve bilişim sektörlerinde de rağbet görmektedir. Yerden kumanda edilebilmelerinden dolayı günümüzde “drone” ismiyle de kullanılmaktadırlar. Klasik helikopterlere göre daha avantajlı olon dört rotorlu quadlar genel olarak askeriyeden, hobiye , arama kurtarmadan, araştırmalara kadar bir çok alanda kullanılmaktadır.

Çalışma Prensipleri
Temel olarak açıklamak gerekirse : Quadcopterler dört pervanesinin aynı anda, aynı devirde ve farklı yönlere dönmesi ile yerden yukarı doğru kalkma hareketi yapar. Pervaneler üzerinde oluşan aerodinamik itiş gücü ile quad yerden yükselir. Helikopterlerde bulunan ve halikopterin kendi etrafında kontrolsüzce dönmesine engel olan kuyruk rotoru, yapısal imkansızlıklardan ötürü dört rotorlu quadlarda bulunmaz. Bunun yerine aracın kontrolsüzce salınım hareketinin önüne geçebilmek için pervaneler farklı yönlerde çalışarak bir denge kuvveti üretir. Çaprazlamasına düşünecek olursak ikisi saat yönünde, diğer çaprazda kalan ikisi de saat yönünün tersine dönerek helikopterlerde ki kuyruk rotorunun etkisini yaratırlar. Sağa veya sola ekstra bir salınım, motorlara verilecek gücün oranı ile dengelenir ki zaten temel olarak hareket de bu şekilde sağlanır. Quadcopterler motorlara verilen güçlerin orantısına göre üç eksende hareket edebilir.
Otopilot Sistemi
Uçuş kartları ve otopilot sistemleri ile drone, hareketi istenen istikamete doğru ilerleyişini en az sapmayla gerçekleştirir. Söz konusu olan şey havacılık ise dış etkenler göz ardı edilemez. Örneğin dronun üzerine  uygulanan tek taraflı bir rüzgar olması durumunda; otopilot sistemi, uygulanan rüzgarın şiddetini ve yönünü gyro kullanarak hesaplar. Tersine bir direnç göstererek aracı stabil tutmaya ve hareketi istenilen doğrultuda tutmaya çalışır. Örn. sağdan gelen bir dış etkiye karşı cihaz sola kayma eğilimi içinde bulunur. Bu durumda otopilot sistemi sol motorlara fazla güç vererek aracı sağa doğru ivmelendirir. Sağdan gelen rüzgar basıncı ve sol motorlardan gelen itiş kuvvetiyle hareket ve sarsıntı optimal düzeyde tutlmaya çalışır. Bugün satın almak isteyeceğiniz bir quadcopter veya akıllı diye adlandırılan bir çok drone modelinde otopilot ve gyro sistemi bulunmaktadır. Bu sayede araç üç eksende rahatlıkla hareket edebilir.
uygulanan tek taraflı bir rüzgar olması durumunda; otopilot sistemi, uygulanan rüzgarın şiddetini ve yönünü gyro kullanarak hesaplar. Tersine bir direnç göstererek aracı stabil tutmaya ve hareketi istenilen doğrultuda tutmaya çalışır. Örn. sağdan gelen bir dış etkiye karşı cihaz sola kayma eğilimi içinde bulunur. Bu durumda otopilot sistemi sol motorlara fazla güç vererek aracı sağa doğru ivmelendirir. Sağdan gelen rüzgar basıncı ve sol motorlardan gelen itiş kuvvetiyle hareket ve sarsıntı optimal düzeyde tutlmaya çalışır. Bugün satın almak isteyeceğiniz bir quadcopter veya akıllı diye adlandırılan bir çok drone modelinde otopilot ve gyro sistemi bulunmaktadır. Bu sayede araç üç eksende rahatlıkla hareket edebilir.
Aerodinamik
Kalibrasyonları yapılmış standart ayarında ki motorlara aynı anda ve aynı miktarlarda verilecek olan güç cihazı sadece yerden kaldırır/indirir. Motorlardan gelen güç ile birlikte pervanelerin üzerinde aerodinamik bir kuvvet oluşur. Bu kuvvet havadan ağır cisimlerin hava da tutulmasını sağlar. Bura da esas olan hızdır. Hız cihaz üzerinde aerodinamik oluşturan temel faktördür ve bu aerodinamik kuvvet motorların dönüşünün belirli bir seviyeye ulaşması ile sağlanır. Buradan yola çıkacak olursak; aracı havada tutunmayı sağlayan, taşımayı üretenin pervaneler iken pervane dönme hareketini sağlayan, hızı oluşturan kısımın pervanelerin takılmış olduğu motorlar olduğunu söylemek isabetli olacaktır.
Quadcopter Tipolojileri
Quadcopterler genellikle x ve +(artı) olmak üzere iki farklı gövde tipinden oluşur. Her iki modelde de gövde uçlarında motorlar vardır ve dışarıdan
görüntüsünde net bir fark görülemez. Ancak burada ki temel fark cihazın burun istikametlerinin farklı yönlerde olmasıdır. İleri yönde bir hareketle hangi motorların ne şekilde çalışması gerektiği sorusunun cevabı quadcopterin gövde tipinde saklıdır.
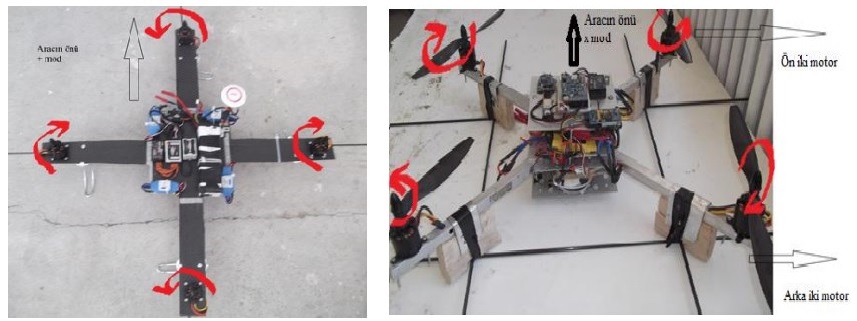
X gövdeli cihazda aracın önü iki motorun orta noktasına gelmektedir. Tüm yönlerde ki hareketi sağlamak için iki motor diğer ikisinden fazla çalışır ve böylece hareketi sağlamak için oluşturulacak motor kuvveti iki farklı motora pay edilerek motor ömrü uzatılır. + mod quadcopterde ön motorun olduğu nokta aracın burun istikametini gösterir. İleri doğru bir hareket istendiğinde ki arkada ki tek motor öndekinden daha fazla tur sayısında dönerek aracı ileri götürmeye çalışır . Sağ ve sol süzülme eylemleri de aynı mukavemette gerçekleşir. Bu durum motorların aşırı zorlanmasına yol açtığı için X gövdeli quadlar daha çok tercih edilir. Uzun motor ömrünün yanı sıra çevikliği ve tepki hızı olarak da X gövdeliler daha tercih edilebilir konuma gelmiştir.





{kind=link}